Bygning af robot basebil
Med udgangspunkt udelukkende i delene i LEGO MINDSTORMS Education NXT Base Set 9797:
har folkene bag nxtprograms.com
udviklet Express-Bot,
som er fotobaserede byggevejledninger for en robot base med udvidelser.
Udfra ideerne i Express Bot er der lavet en simpel robot basebil bestĺende af tre moduler:
en basebil
, en kofanger og en vćrktřjsmotor. De tre moduler kan bygges ud
fra byggevejledninger lavet ved hjćlp af vćrktřjet
Lego Digital Designer (LDD).
Inden den fřrste byggevejledning kan bruges, skal
LDD installeres
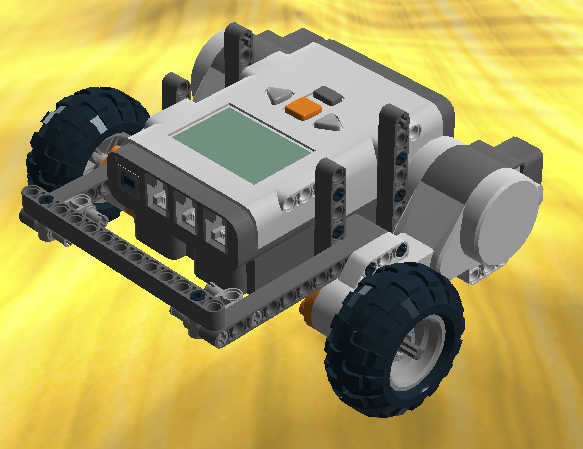
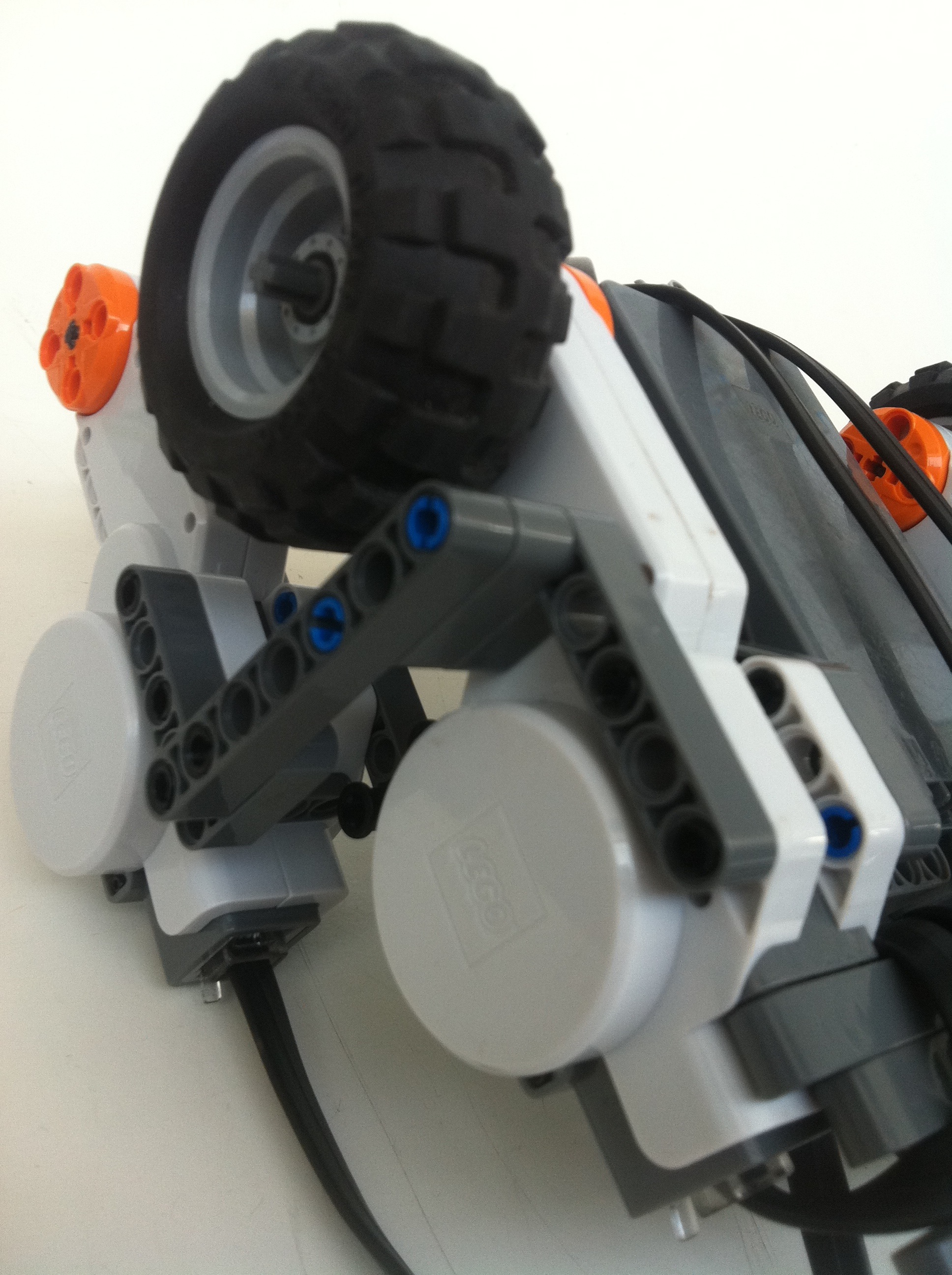
pĺ maskinen. Nĺr de tre moduler er samlet ser robot basebilen sĺdan her ud
(klik pĺ billedet for at se det
i stor střrrelse):
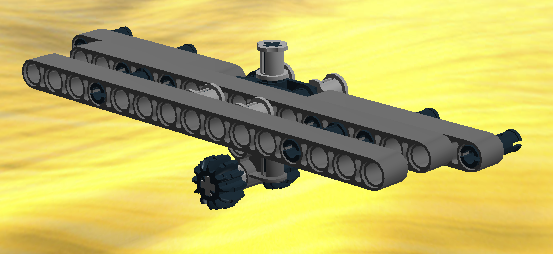
De tre moduler basebil, kofanger og vćrktřjsmotor ser sĺdan her ud:
De enkelte moduler kan sĺ sćttes sammen til sidst eller efterhĺnden som de bygges.
Det betyder, at flere kan vćre igang med at bygge samtidigt.
Basebil
Hent byggevejledningen for basebilen.
Ĺben byggevejledningen, filen base.lxf, i Lego Digital Designer.
Under menuen View skiftes til Building guide mode.
Nu viser LDD en byggevejledning i 17 trin, som basebilen kan bygges efter.
Basebil med kofanger bagpĺ
Hent byggevejledningen for kofangeren.
Ĺben byggevejledningen, filen rear.lxf, i Lego Digital Designer.
Under menuen View skiftes til Building guide mode. Nu viser LDD en byggevejledning i 8 trin.
Der er desvćrre ikke mĺl pĺ de aksler, som skal bruges. I byggevejledningen bruges
fire aksler. Akslerne er tre sorte 4'ere og en grĺ 3'er.
Aksler mĺles ud fra antal huller i teknikbjćlker, som vist i
NXT Brugervejledning side 80, altsĺ er en 4'er akse lig 4 huller:
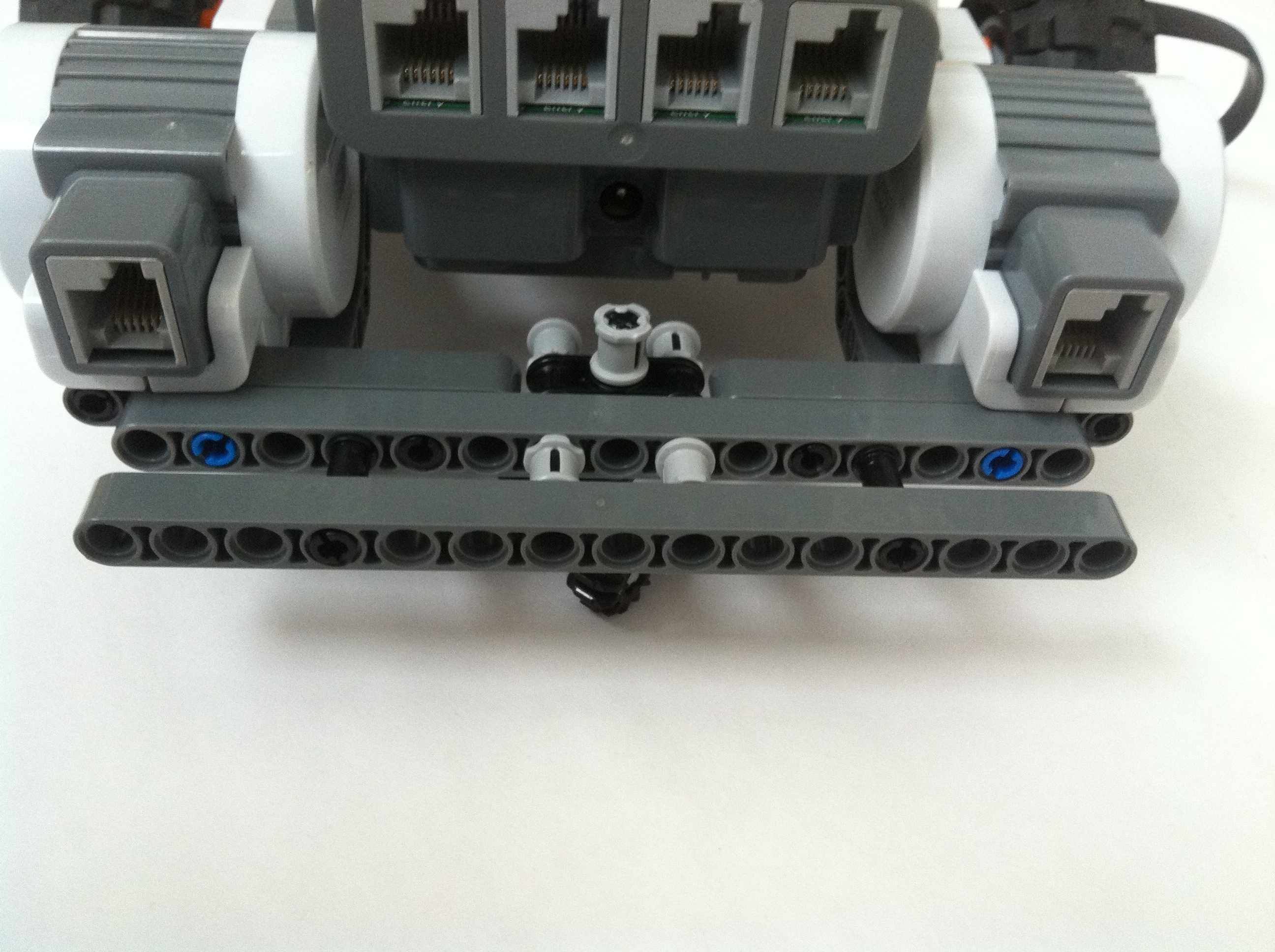
Kofangeren monteres bag pĺ basebilen (klik pĺ billedet for at se det
i stor střrrelse):
Nu skal de to motorer forbindes til de to porte B og C. For at ledningerne ikke
skal stritte ud og genere,
kan det vćre bekvemt at fřre ledningerne nedenunder NXT'en og vikle dem om kofangeren sĺdan her -
fjern 15'er teknikbjćlken inden ledningen vikles om og sćt den pĺ bagefter
(klik pĺ billedet for at se det
i stor střrrelse):
Basebil med vćrktřjsmotor
Hent byggevejledningen for vćrktřjsmotor.
Ĺben byggevejledningen, filen motor.lxf, i Lego Digital Designer.
Under menuen View skiftes til Building guide mode. Nu viser LDD en byggevejledning i 9 trin.
Der er desvćrre ikke mĺl pĺ de aksler, som skal bruges. I byggevejledningen bruges
to aksler: En sort 6'er og en sort 10'er. Aksler mĺles ud fra antal huller i teknikbjćlker, som vist i
NXT Brugervejledning side 80.
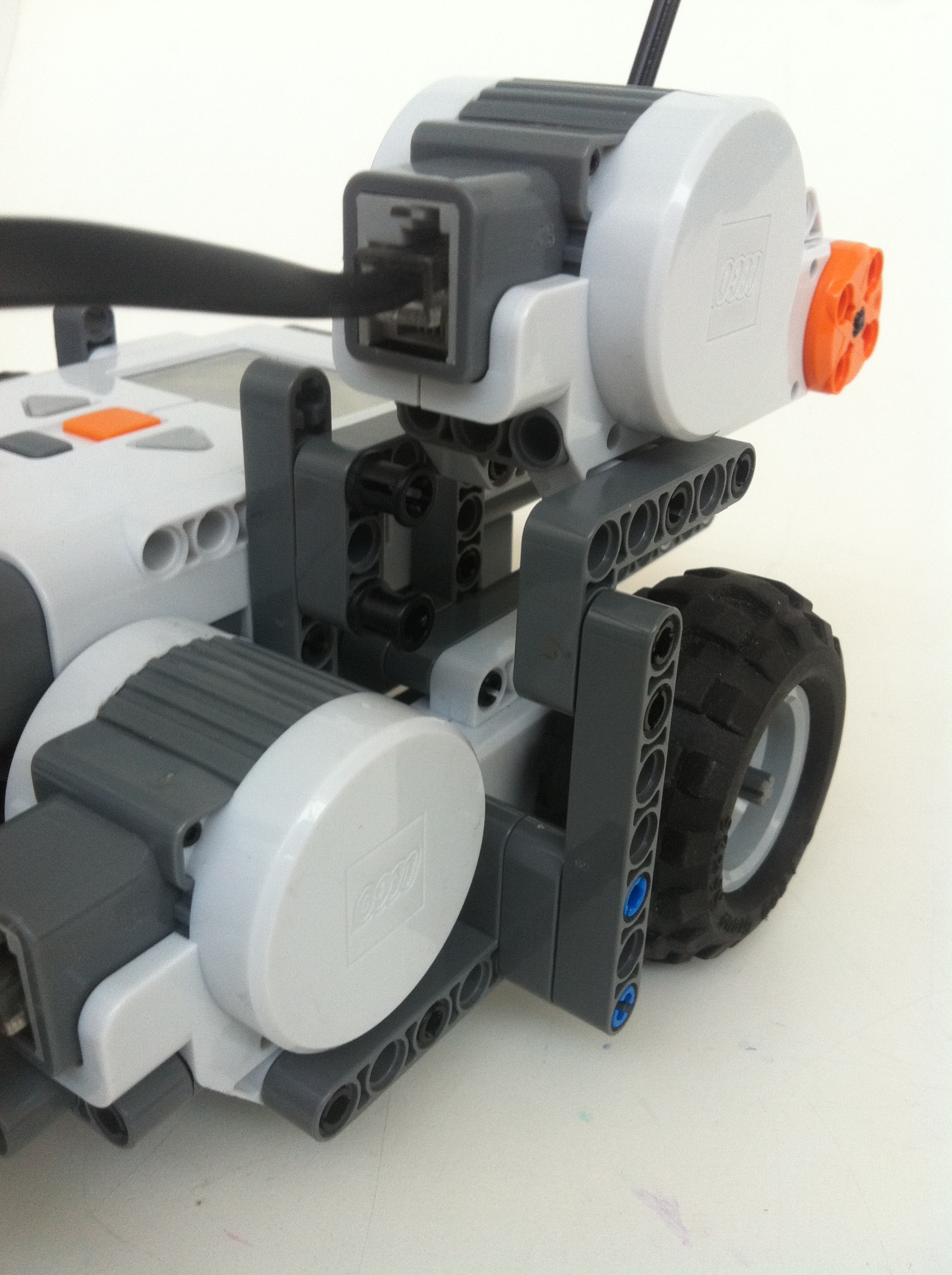
Vćrktřjsmotoren monteres pĺ basebilen, som vist her (klik pĺ billedet for at se det
i stor střrrelse):
Vćrktřjsmotoren skal forbindes til port A.
Programmering af robot basebil
1. Programmering af křrsel med basebil
Prřv nu at se, hvordan robot basebilen křrer ved at bruge et simpelt program med blot et křr ikon:
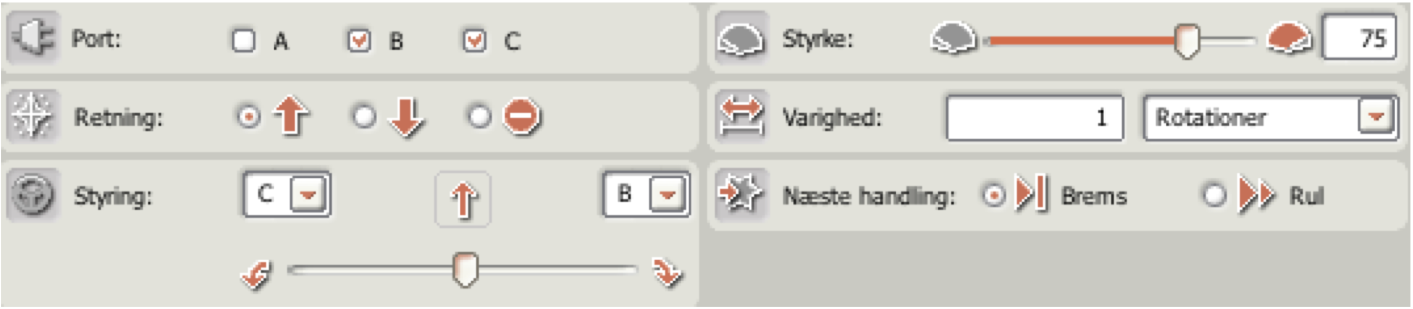
I konfigureringspanelet for křr ikonen ses, at bilen er sat til at křre fremad
en rotation af hjulet med motorstyrke 75:
Eksperimenter med ćndringer i konfigureringspanelet, sĺ bilen bakker, křrer lćngere
end en rotation, křrer hurtigere, eller drejer.
Prřv ogsĺ med at sćtte flere křr ikoner efter hinanden og fĺ pĺ
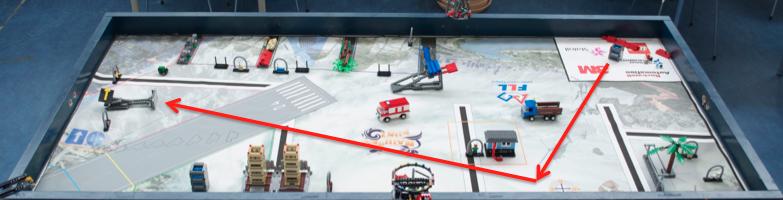
den mĺde robotbilen til at křre en rute pĺ FLL banen.
F. eks. fra basen
og hen til opgaven evakueringsskilt - rřd rute:
og tilbage til basen igen. Det er svćrt at fĺ robotbilen til at křre lige, ikke?
Prřv med forskellige motorstyrker og undersřg, hvornĺr robotbilen křrer mest lige.
2. Programmering af vćrktřjsmotor
Prřv nu at undersřge, hvordan vćrktřjsmotoren pĺ robot basebilen bevćger sig og dermed hvordan
"pinden" bevćger sig. Brug et simpelt program med blot et křr ikon:
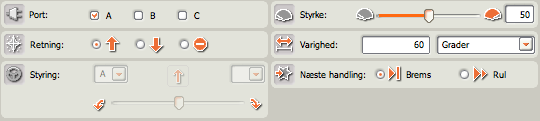
I konfigureringspanelet for křr ikonen ses, at vćrktřjsmotoren er sat til at dreje
60 grader med motorstyrke 50 og
Retning er sat til at vćre pilen som peger opad:
Prřv med konfigureringspanelets indstillinger og find ud af, hvilken vej motoren drejer.
Eksperimenter med ćndringer i konfigureringspanelet for at finde ud af, hvordan pindens
bevćgelse kan styres. Hvad sker f.eks. hvis
pinden forhindres i at dreje det gradantal, som er angivet i konfigurationspanelet?
Anvendelse af brugerdefinerede programmeringsblokke
Nĺr robotbilen skal programmeres til at bevćge sig rundt pĺ banen, kan det vćre bekvemt
at kunne angive strćkninger i cm
og ikke i rotationer eller grader. Det ser ogsĺ ud som om det at dreje robotbilen 90 grader
skal bruges tit. Derfor kan det vćre
nyttigt en gang for alle at finde ud af, hvor mange grader hjulene skal dreje, for at
robotbilen drejer 90 grader.
Detaljerne i hvordan robotbilen programmeres til at křre f.eks. 20 cm frem, dreje
90 grader mod uret, osv,
kan skjules i sĺkaldte
brugerdefinerede programmeringsblokke.
For at vise hvordan brugerdefinerede programmeringsblokke kan bruges
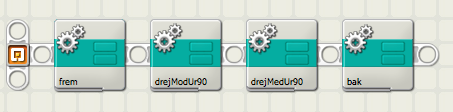
i forbindelse med robot basebilen, er der lavet fire programmeringsblokke:
frem, drejModUr90, drejMedUr90 og bak.
De fire blokke er brugt i et program, kaldet fremOgTilbage,
for at illustrere, hvordan de kan bruges til at fĺ robotbilen til at bevćge sig
- som det ses pĺ videoen:
Fĺ nu programmet fremOgTilbage til at styre den nybyggede robot basebil:
- Hent programmet fremOgTilbage.rbtx
- Start programmeringsvćrktřjet
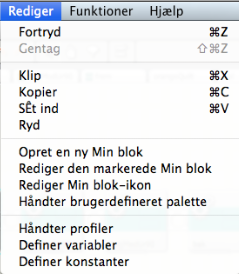
- Gĺ ind i menuen Rediger:
og vćlg Hĺndter profiler:
under Navn skrives et selvvalgt navn, f.eks. FLL. Tryk pĺ Opret og en profil med navnet
FLL er oprettet.
- Vćlg den oprettede profil:
og ĺben programmet fremOgTilbage.rbtx i fil-menuen.
Efter lidt tid ĺbnes programmet og det vises med navnet fremOgTilbage.
Overfřr programmet til NXT pĺ den nybyggede robot basebil for at se hvordan bilen opfřrer sig.
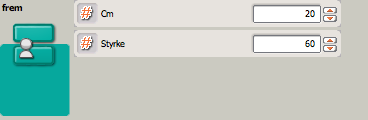
Klik pĺ blokken frem og se konfigureringspanelet for frem.
Her kan den strćkning, som skal křres, angives i cm
og motorstyrken angives som et tal imellem 0 og 100:
Prřv ogsĺ at klikke pĺ de andre blokke og se hvad der skal angives.
Eksperimenter med forskellige vćrdier
og se hvordan robotbilen opfřrer sig.
Prřv nu at eksperimentere med programmer. hvor de fire blokke bruges:
- Ĺben et nyt program:

- Tryk pĺ Min palette:

- Fĺ de brugerdefinerede blokke frem ved at klikke pĺ den řverste grřnne firkant:

- Vćlg f.eks. blokken frem og anbring blokken i programmet.
Prřv nu at křre korte og lange strćkninger og mĺl efter om robotbilen nu ogsĺ křrer
det antal cm, som gives til blokkene.
Prřv at lave ruter, som fĺr robotbilen forskellige steder hen pĺ robotbanen.
Ret i brugerdefinerede programmeringsblokke
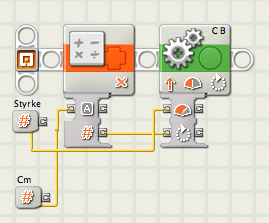
Dobbeltklik pĺ blokken frem og se, hvad der skjuler sig inde
i den brugerdefinerede programmeringsblok:
I det fřrste ikon, matematik ikonen, ganges antal cm,
f.eks. 20, med 21,3
( som kan ses i konfigureringspanelet for matematik ikonen).
Resultatet 426 fřres via datakablet til antal grader
hjulet sćttes til at dreje i křr ikonen.
Faktoren 21,3 er fundet ved at lade hjulet křrer 360 grader,
mĺle strćkningen til 16,9 cm og sĺ udregne 360/16,9 grader/cm = 21,3 grader/cm.
Hvis faktoren skal ćndres, sĺ det passer med den nybyggede basebil, kan det
ćndres her i konfigureringspanelet for
matematik ikonen. Husk at gemme den ćndrede udgave af frem:
hvis konstanten 21,3 ćndres.
Ikonen bak er nćsten som frem, křr ikonet er dog sat til at křre den modsatte retning.
Hvis bilen ikke bakker helt
det antal cm som angives, skal der ćndres i konstanten i matematik ikonen i bak.
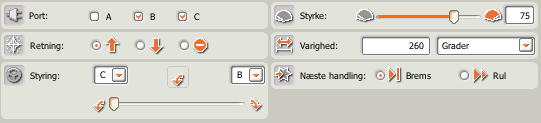
Inde i drejMedUr90 er der blot et ikon:
og i konfigurationspanelet for křr ikonen er antal grader sat til 260 og den lille hvide markering
under Styring er
fřrt helt ud til venstre, sĺ robotbilen drejer med uret om et centrum som ligger midt imellem hjulene:
Konstanten er fundet ved at lade robotbilen dreje fire gange 90 grader med uret styret af
et program med kun drejMedUr90 og sĺ se om bilen nĺede en hel omgang rundt:
Pĺ videoen ses, at bilen drejer en smule mere end 360 grader, sĺ
konstanten skulle mĺske rettes til 255. Det er altsĺ denne konstant, som skal ćndres,
hvis den byggede robotbil ikke drejer 90 grader.
Husk at gemme den ćndrede udgave af drejMedUr90.
|