Sidst opdateret 21.9.16.
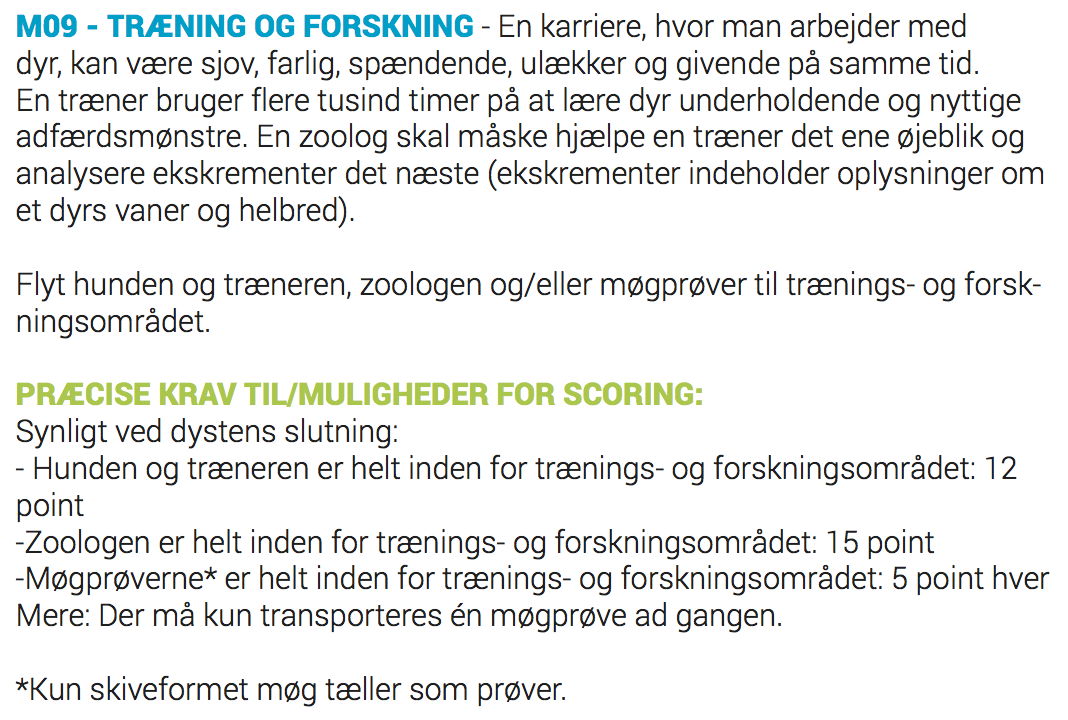
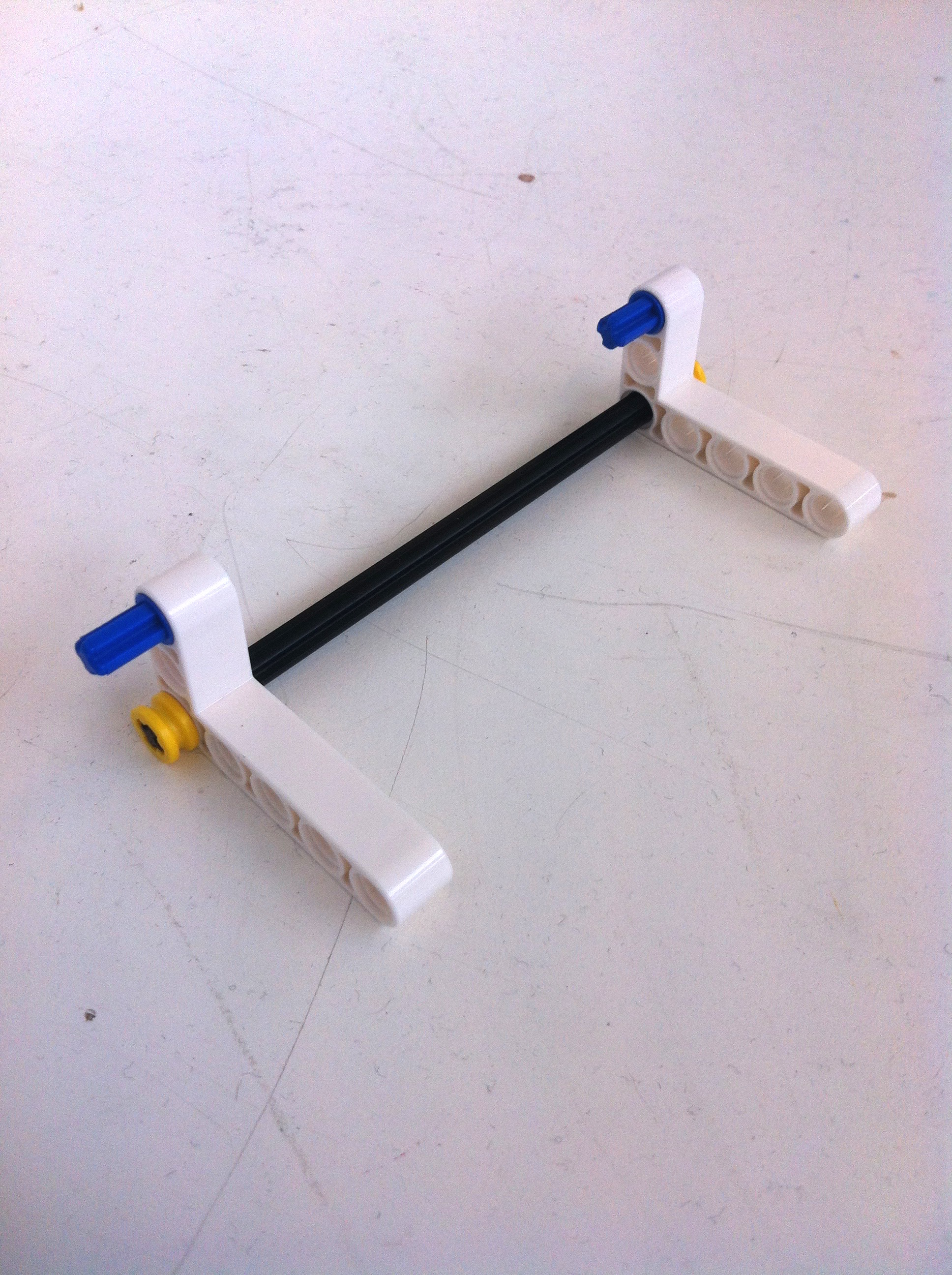
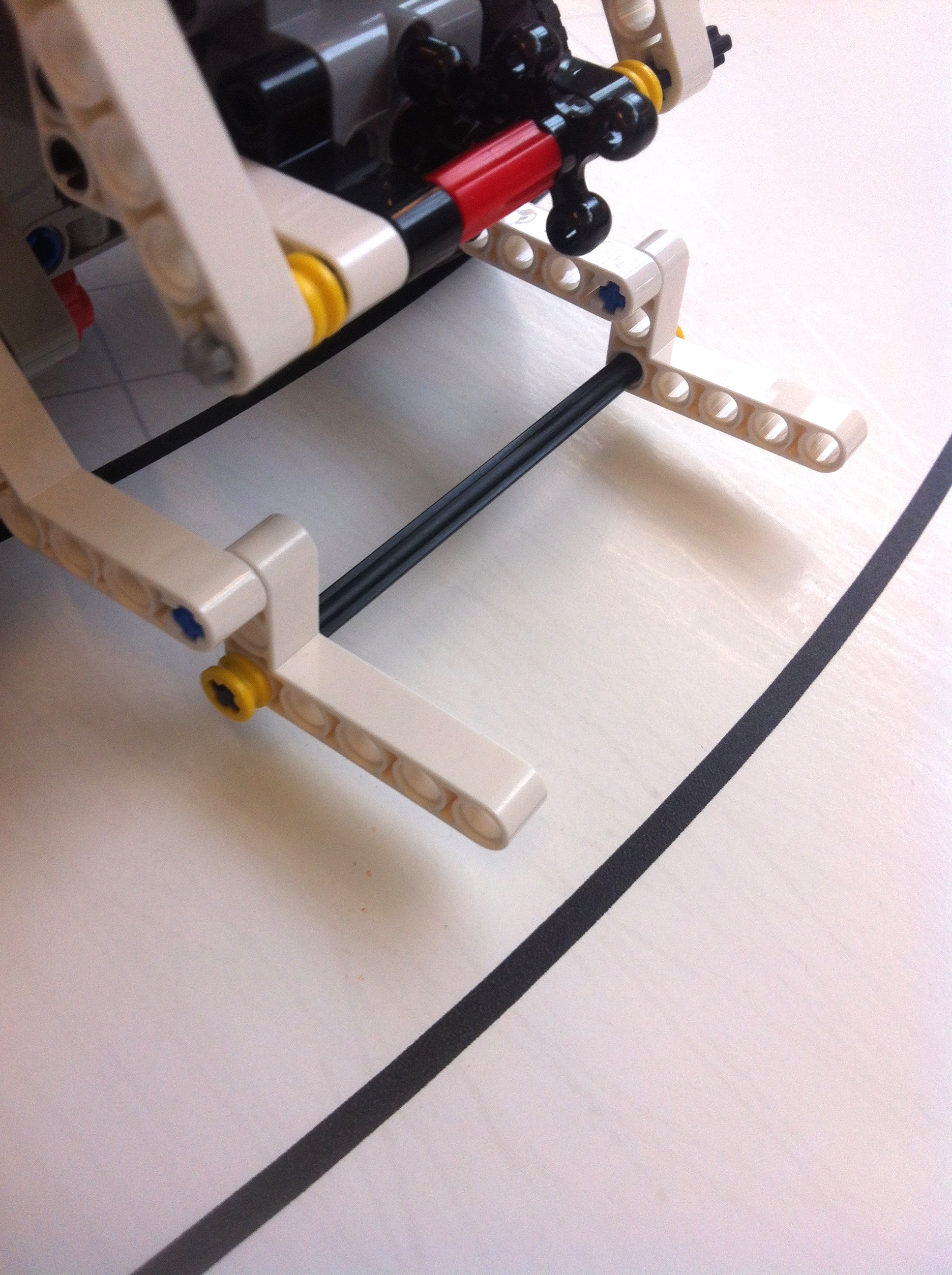
MissionHund og træner til trænings- og forskningsområdeSe på videoen, hvordan robotbilen fra en startposition i basen kører ud og aflevere hund og træner samt en møgprøve i trænings- og forskningsområde:RedskabDer skal bygges et redskab, som kan skubbe hund og træner samt en møgprøve under kørslen til træningsområdet. Redskabet og monteringen af redskabet på robotbilen kan se sådan her ud (klik på billede for at se det i stor størrelse):ProgramProgrammet som styrer robotbilen på videoen, ser sådan her ud:Programmet består af to dele:
Bemærk, hvor nøjagtigt der skal sigtes, så robotbilen lige præcist kører ud til træningsområdet. |