Sidst opdateret 25.8.17.
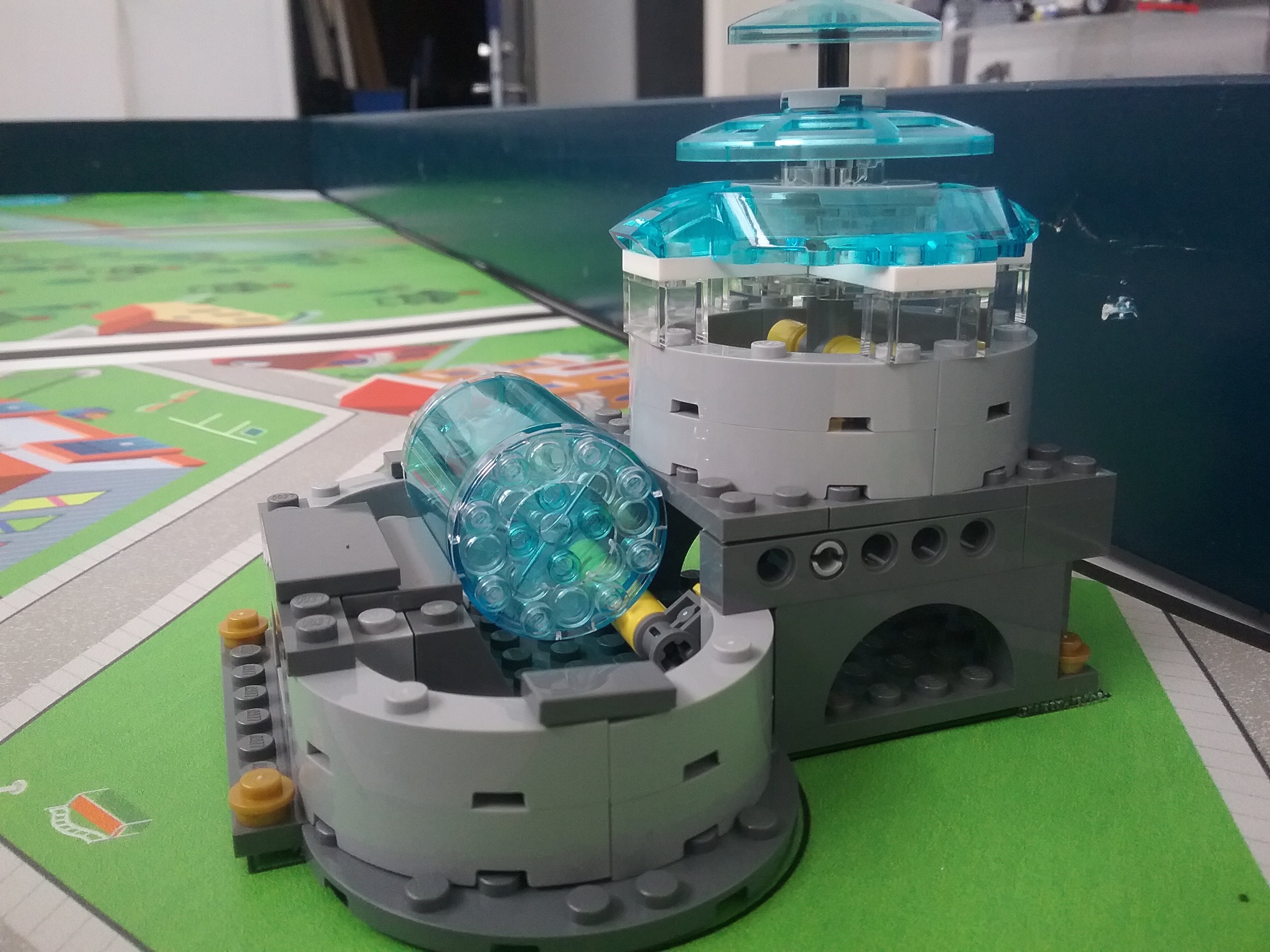
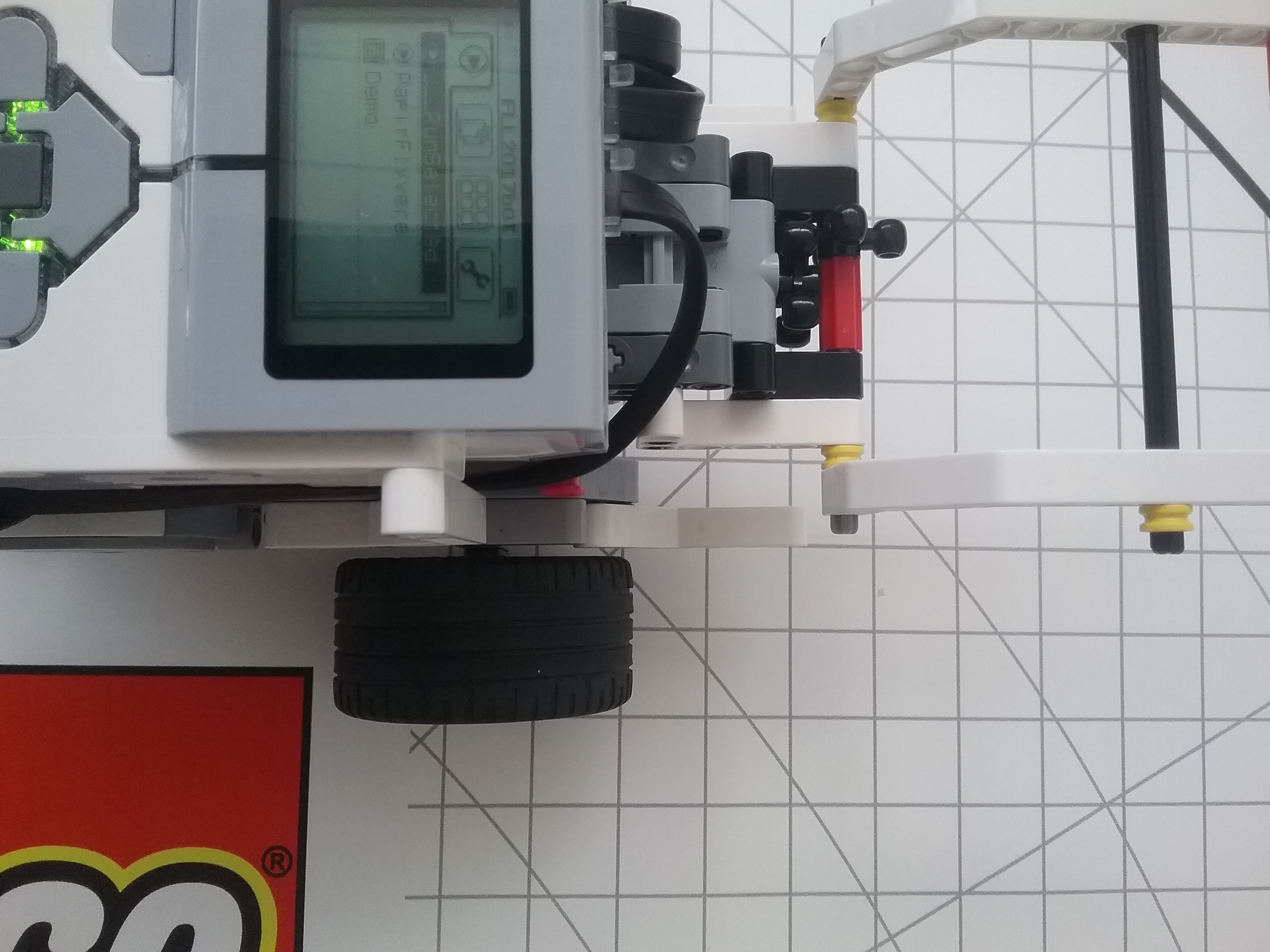
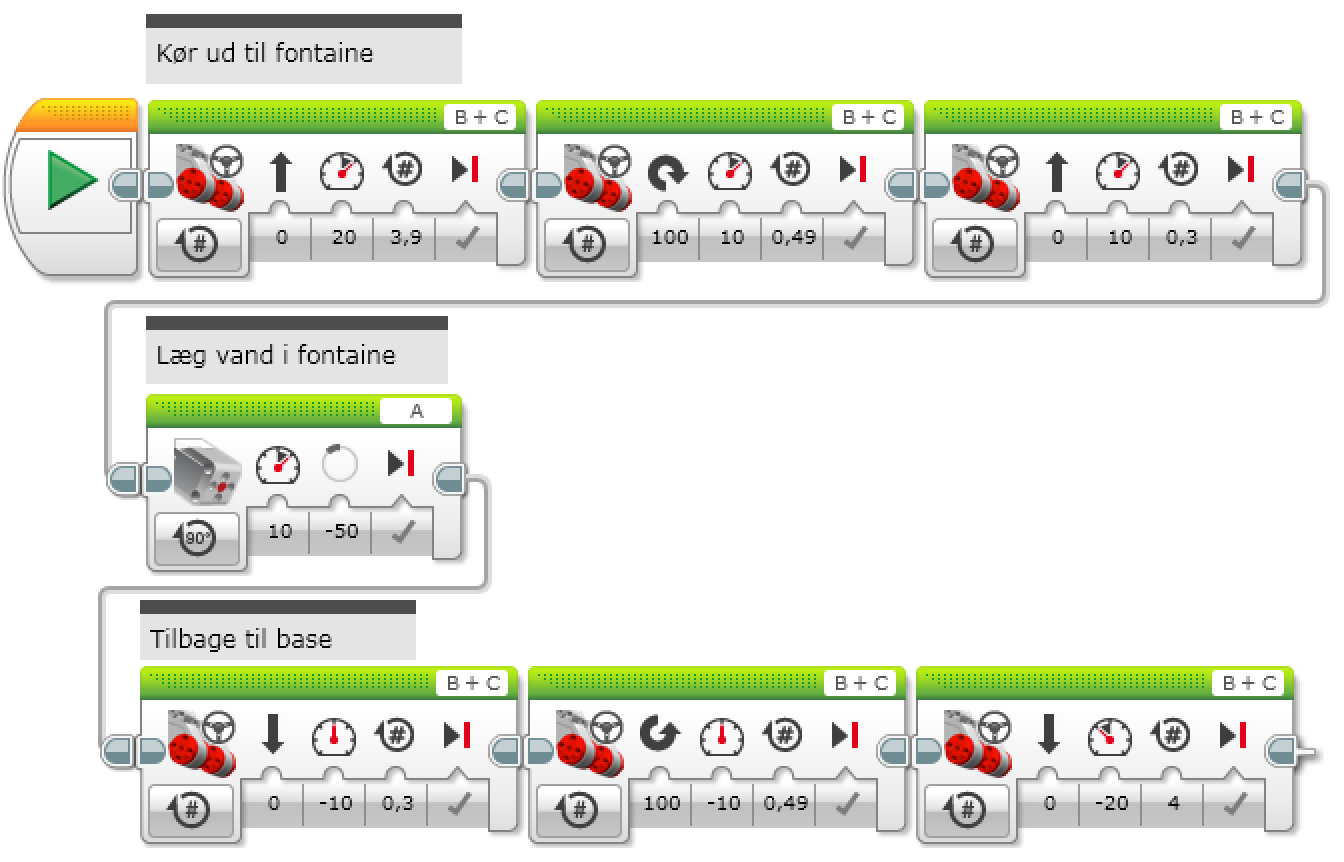
MissionVand til springvandetSe på videoen, hvordan robotten fra en startposition i basen kører ud og afleverer vand i springvandets bassin:Resultatet er at springvandet "springer": RedskabDer skal indsættes en 12'er akse i armen, så armen kan bære vandet hen til springvandet (klik på billede for at se det i stor størrelse):ProgramProgrammet som styrer robotten på videoen, ser sådan her ud:Programmet består af tre dele:
Bemærk, hvor nøjagtigt robotten skal stilles i basen, så robotten kører præcist ud til springvandet. |