Crazy BirdForskere i Schweiz har brugt Lego Mindstorms NXT til at studere forskellige gangarter. Bl.a. har de lavet en Lego robot kaldet Crazy Bird, som kan ses pĺ videoen:Crazy Bird kan bygges ud fra tre moduler, nemlig basen, benene og nćbet:
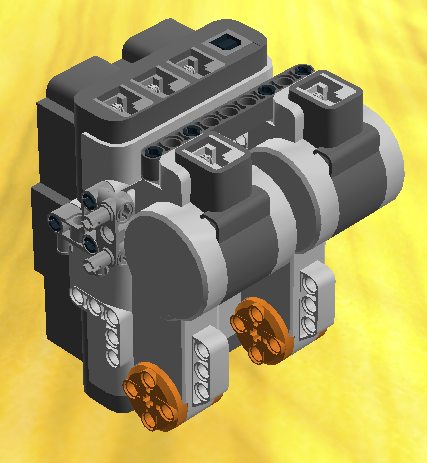
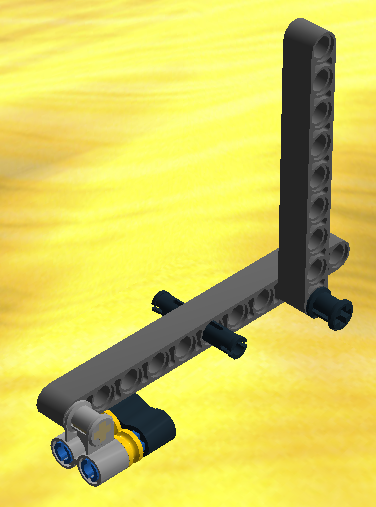
De tre moduler kan bygges ud fra tre byggevejledninger lavet ved hjćlp af vćrktřjet Lego Digital Designer (LDD). Inden byggevejledningerne kan bruges, skal LDD installeres pĺ maskinen. Hent fřrst byggevejledningen for basen. Ĺben byggevejledningen, filen crazyBirdBase.lxf, i Lego Digital Designer. Under menuen View skiftes til Building guide mode. Nu viser LDD en byggevejledning i 10 trin, som basen kan bygges efter. Nĺr basen er bygget skal de to motorer forbindes til de to porte B og C. Hent derefter byggevejledningen for benene. Ĺben byggevejledningen, filen crazyBirdLeg.lxf, i Lego Digital Designer. Under menuen View skiftes til Building guide mode. Nu viser LDD en byggevejledning i 7 trin, som benene kan bygges efter. Benene monteres pĺ basen, som vist her (klik pĺ billederne for at se detaljer): Hent endelig byggevejledningen for nćbbet. Ĺben byggevejledningen, filen crazyBirdBeak.lxf, i Lego Digital Designer. Under menuen View skiftes til Building guide mode. Nu viser LDD en byggevejledning i 3 trin, som nćbbet kan bygges efter. Benene monteres pĺ basen, som vist her (klik pĺ billedet for at se detaljer): Se pĺ Programmering af SillyBot for at fĺ inspiration til, hvordan Crazy Bird kan programmeres. Forskellige ben, forskellige gangarterPĺ basen for Crazy Bird kan ben monteres pĺ mangfoldige forskellige mĺder, som vist pĺ videoen:
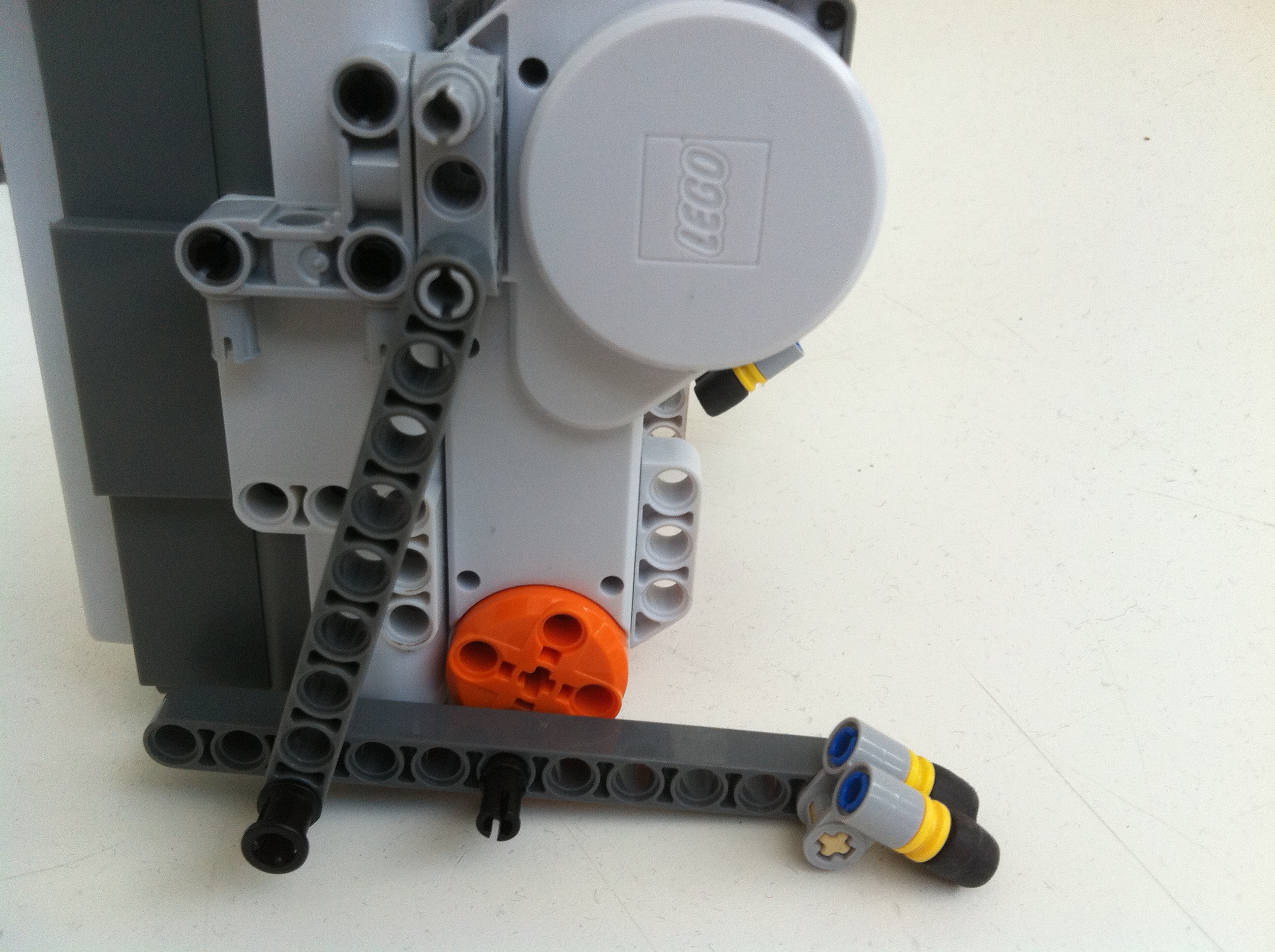
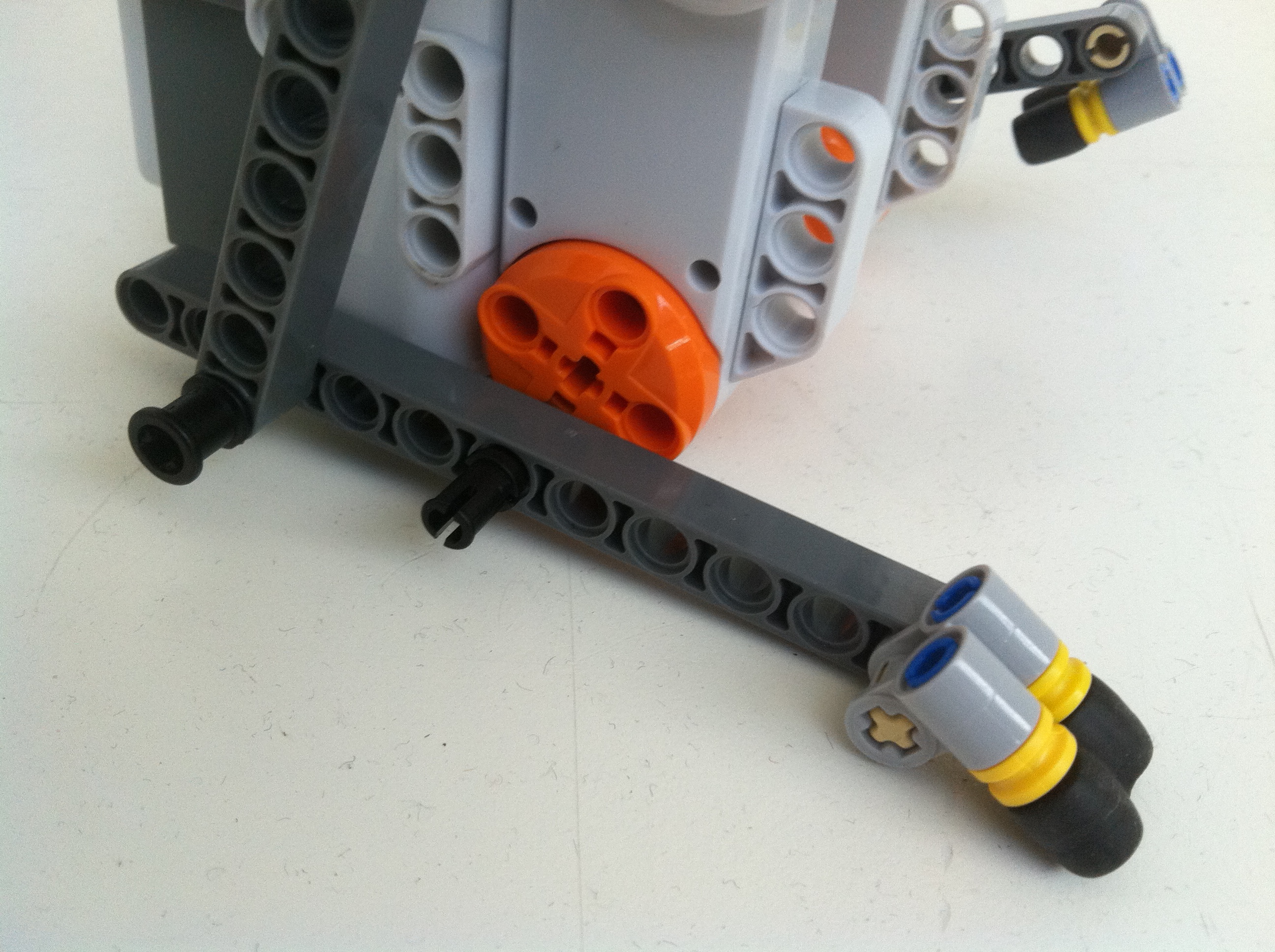
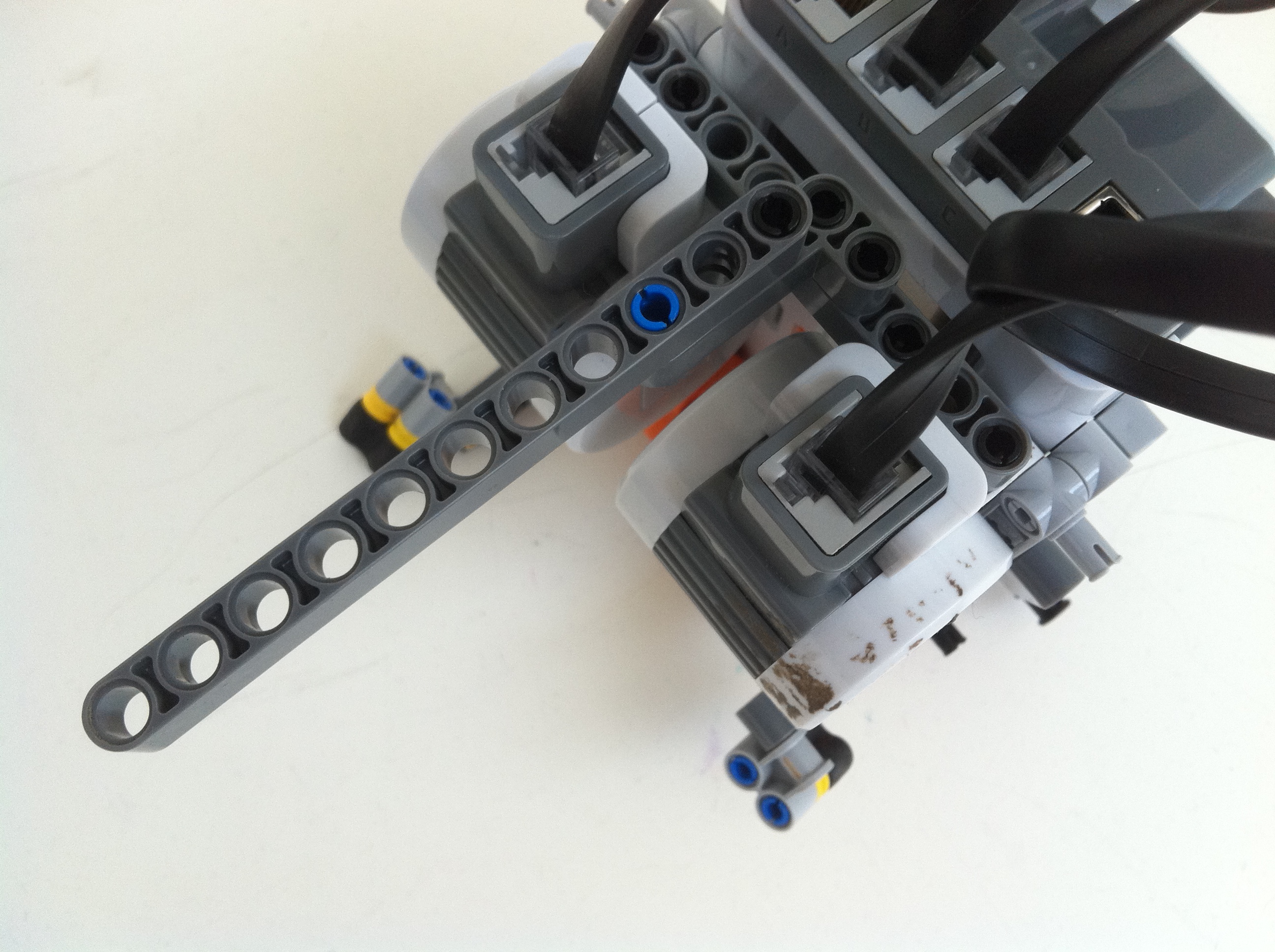
Stoppes videoen, kan de forskellige ben bygges ud fra billederne, f.eks. ud fra de to billeder:
Benene skal vćre lidt lćngere hvis der bruges genopladeligt batteri, som vist her ( klik pĺ billedet for at se detaljer): |