![]()
Sidst opdateret 25.9.12.
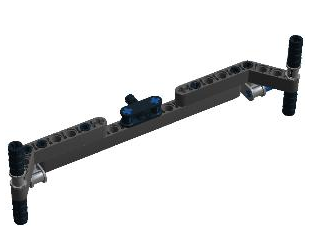
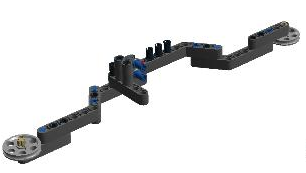
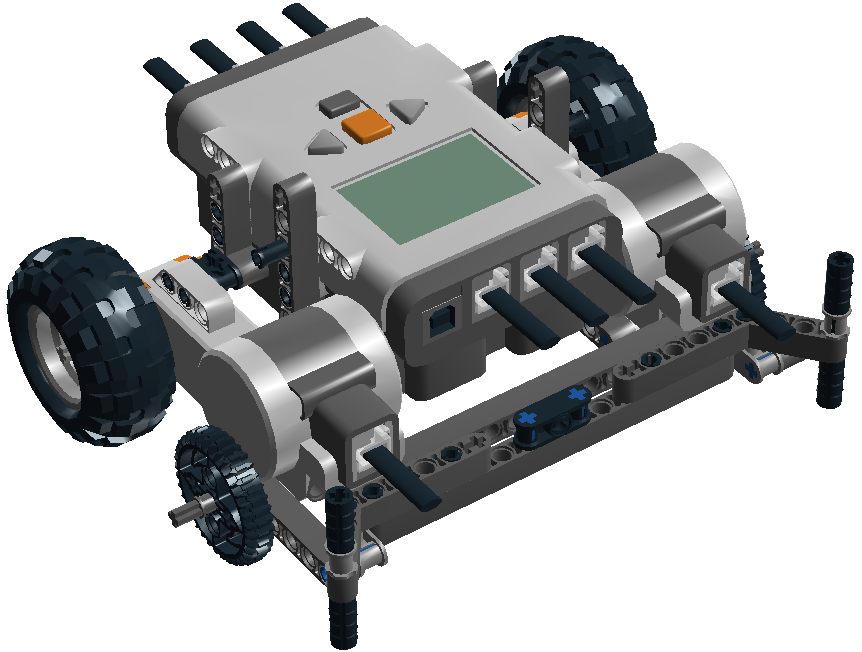
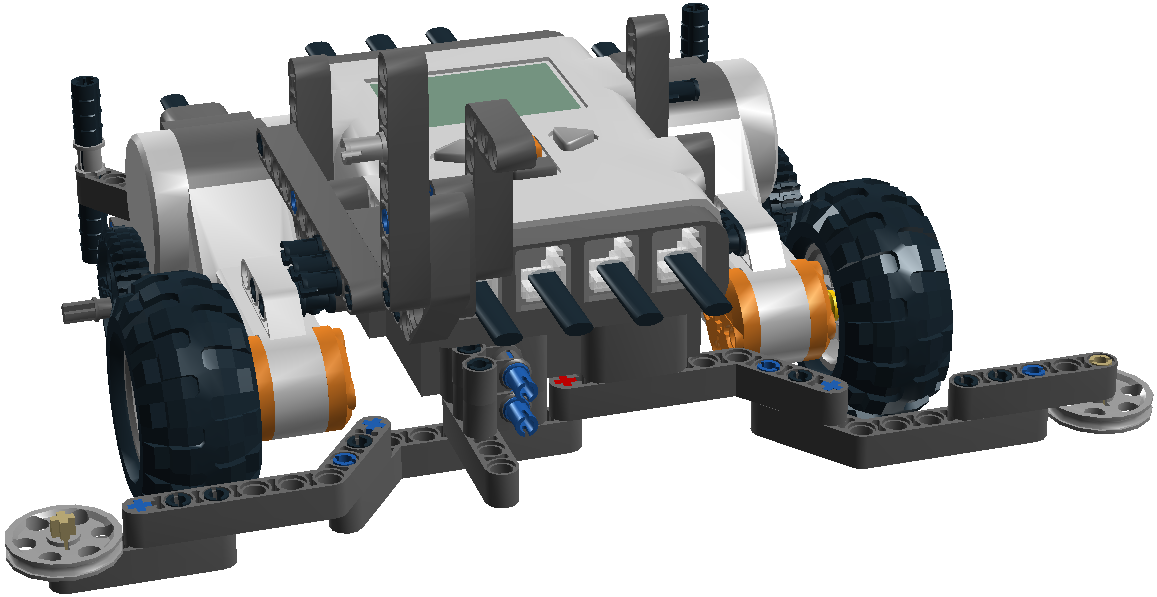
Bygning og montering af kofangereHent de to byggevejledninger for kofanger bagpå og kofanger foran og byg de to:I byggevejledningen for kofanger bagpå bruges to sorte 4'er aksler. De to kofangere monteres bagpå og foran som vist ( klik på figurerne for at se dem i større udgaver):
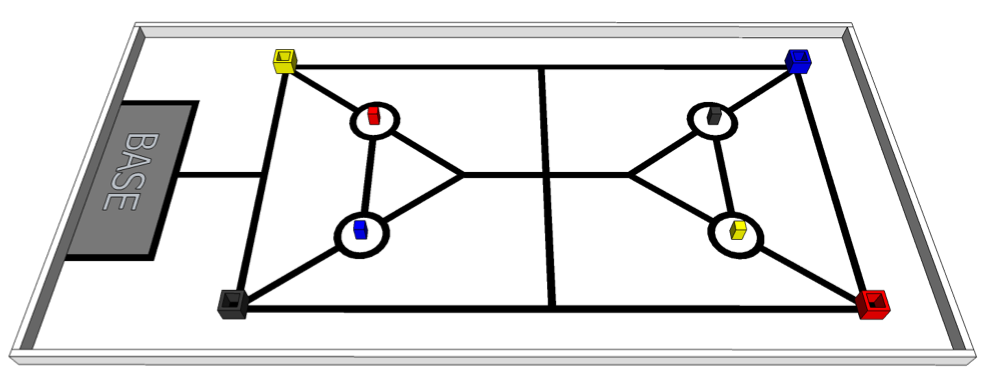
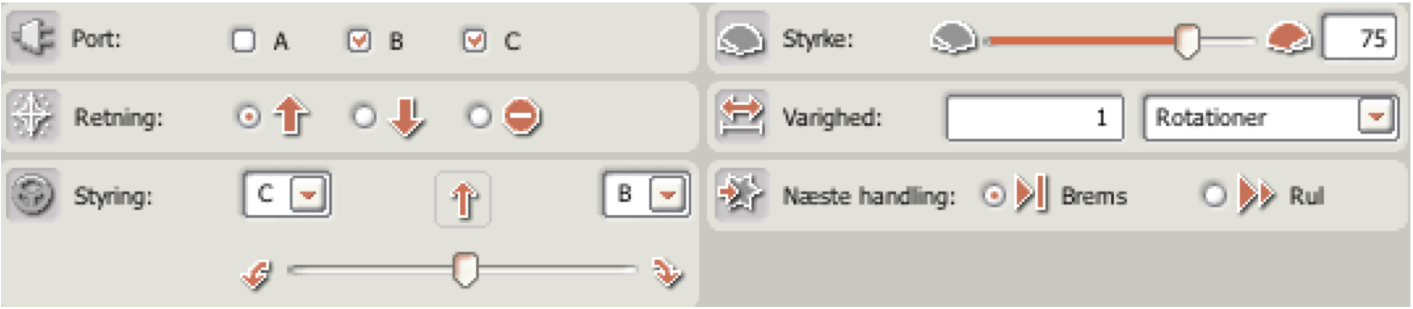
Ledningerne imellem de to motorer og NXT'en kan vikles om den monterede kofanger bagpå, så ledningerne ikke sidder i vejen under kørslerne: Klik på banen og se hvordan kofangeren bagpå bruges til at sikre, at robotbilen retter op, når den bakker ind i kanten. Og se hvordan hjulene på kofangeren foran bruges til at holde en bestemt afstand til kanten, så den er i en bestemt afstand til kuberne, når de hentes: Programmering af robotbil med kofangereKofangeren foranPrøv at eksperimentere med, hvordan robotbilen kan programmeres til at køre langs med en kant ( eller en væg ) til højre for bilen, så det lille grå hjul på kofangeren foran så at sige kører på kanten. Bruge et simpelt program med blot et kør ikon:For at få bilen til at køre fremad og holde lidt til højre skal Styring i konfigureringspanelet for kør ikonen ændres. Indstil Styring ved at trække den hvide firkantede markering midt i lidt til højre. Lad den køre lidt flere rotationer, så den kan køre ind mod kanten og så holde sig der: Prøv også at få den til at bakke og holde ind mod en kant til venstre. Kofangeren bagpåI programmet modKant.rbtx bruges to brugerdefinerede programmeringsblokke, fremSek og bakSek til at demonstrere, hvordan bilen bruger kofangeren bagpå til at rette op, når den bakker ind i kanten af banen. Også selvom bilen ikke kører vinkelret ind i kanten. Se på videoen hvordan:I konfigureringspanelet for bakSek og fremSek, kan det antal sekunder bilen skal bakke eller køre fremad sættes: I 3 sekunder kører bilen cirka 60 cm. Det betyder, at hvis afstanden til kanten er lidt under 60 cm, vil bilens motorer blive ved at køre og så retter bilen op. Og laver lidt hjulspin inden bilen kører frem i 3 sekunder. |