![]()
Sidst opdateret 12.9.12.
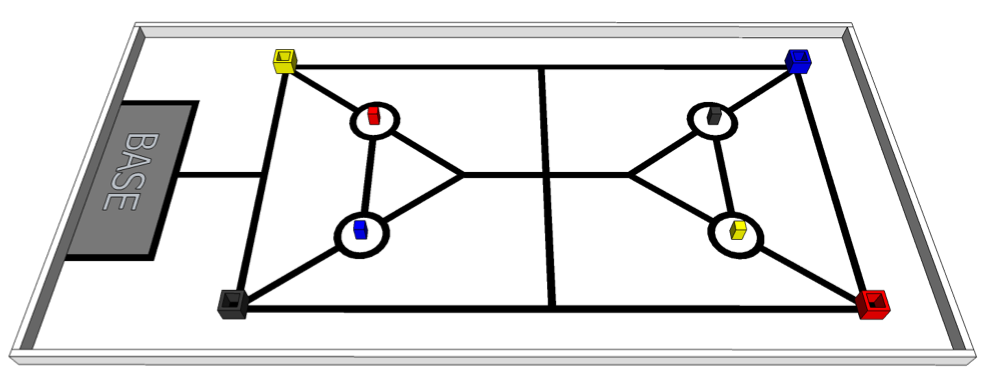
I programmeringen af robotbilen bruges ikke lyssensorer. Men modellerne er forberedt på, at det måske kunne være nyttigt
at bruge de sorte streger til at navigere efter. Det er umiddelbart simpelt blot at montere en lyssensor på
fronten af robotbilen:
Da denne lyssensor sidder midt imellem forhjulene, kunne den bruges til at følge stregerne f.eks. i den yderste rektangel på banen: Det kunne også være nyttigt at montere en lyssensor på siden, så robotbilen kan stoppe op ved en krydsende sort streg. Der skal lige sættes et par klodser på en lyssensor, så kan den monteres på siden af robotbilen: Da der indtil nu kun er brugt to sensor porte, skal de to lyssensorer blot tilsluttes de sidste to sensor porte. |