Sidst opdateret 5.8.15.
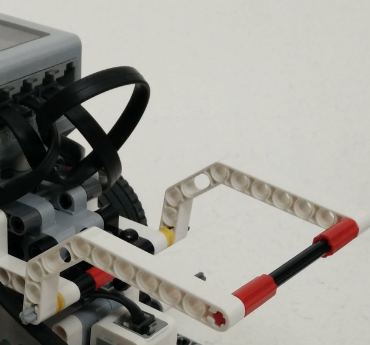
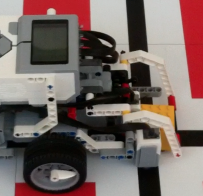
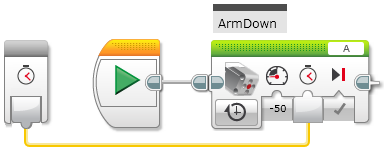
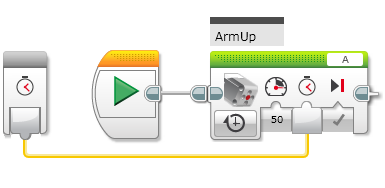
ArmDown og ArmUpDe to blokke ArmDown og ArmUp bevæger armen, som er styret af værktøjsmotoren, den mellemstore motor på port A. Armens startposition forudsættes at være vandret sådan her:Fra denne position vil udførelse af ArmDown bevæge armen, så den fastholder en kube sådan her: Når kuben skal afleveres på et anbringelsessted, vil udførelse af ArmUp sørge for, at armen bevæger sig tilbage til den vandrette position. Åbnes de to blokke ArmDown og ArmUp, ser de sådan her ud: De to blokke har begge én input parameter, sekunder, som er det antal sekunder armen skal bevæge sig. Motoren benyttes altså i tilstanden Tændt i sekunder, se under EV3 hjælp > Programmeringsblokke > Handlingsblokke > Mellemstor motor. Motoren bevæger sig ned med en moderat hastighed ved at sætte parametren Strøm til -50 og op igen ved at sætte Strøm til 50. I både GetCube og DeliverCube er input parametren sekunder sat til 0,2 sekunder. Det ser ud til at passe med kubernes størrelse og den vandrette udgangsposition. Grunden til at Tændt i sekunder benyttes i stedet for f.eks. Tændt i grader er, at programmet vil kunne blive blokkeret og gå i stå, hvis armen fejlagtigt placeres til at starte med, så armen ikke kan dreje det antal grader, der er angivet som parameter. Det sker ikke med Tændt i sekunder, når sekunderne er gået fortsættes i programmet med næste blok, uanset om armen kunne dreje frit i alle sekunderne eller ej. |