DeliverCube
Når WRO Starter Bot 2015 står med en kube ved en linie den skal følge for at komme hen til et anbringelsessted i et af de farvede områder, sørger
blokken DeliverCube for, at robotten følger linien hen til stedet, stopper og løfter armen, så kuben frigives:
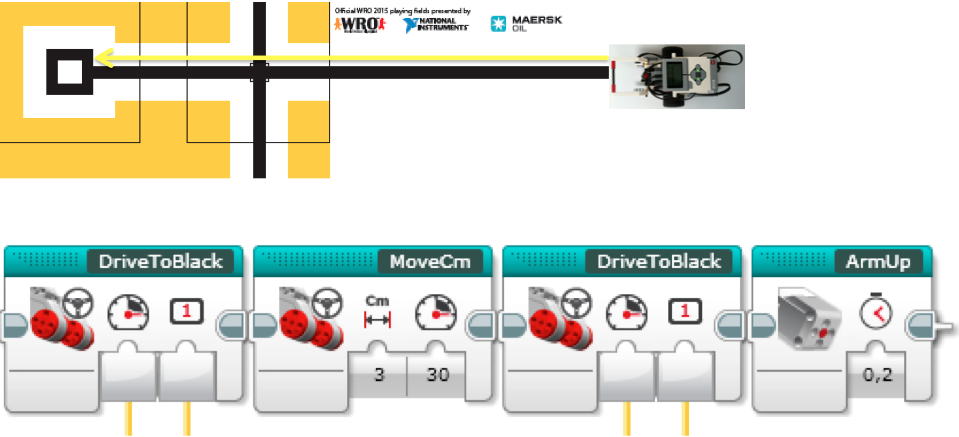
DeliverCube består, som vist, af fire blokke:
- Den første blok, DriveToBlack, sørger for, at robotten følger stregen indtil
farvesensoren på port 4 registrerer den første, sorte tværstreg på linien, som følges. Derefter stoppes robotten.
- Blokken MoveCm får robotten til at køre 3 cm frem, så farvesensoren på port 4 er fri af den sorte tværstreg og er over hvid.
- Den tredie blok, DriveToBlack, sørger for, at robotten igen følger stregen indtil
farvesensoren på port 4 registrerer den sorte tværstreg, der er en af siderne i firkanten, som markerer anbringelsesstedet. Derefter stoppes robotten.
- Blokken ArmUp løfter armen, så kuben frigives.
De to input parametre til DeliverCube, minPower og P, gives videre som input til de to DriveToBlack blokke.
|