Sidst opdateret 10.8.15.
wroRegular.ev3p - program til WRO Starter Bot 2015Når WRO Starter Bot 2015 kører på en bane uden bjerge, som det ses på videoen:
styres WRO Starter Bot 2015 af et program som hedder wroRegular.ev3p. Programmet findes i projektet WRO2015.ev3 og programmet gennemgås i det følgende. Kuberne hentes og placeres én ad gangenIdeen bag programmet wroRegular.ev3p er at få robotten til at hente de 4 farvede kuber én ad gangen i rækkefølgen:
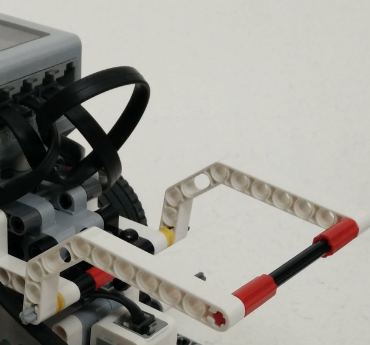
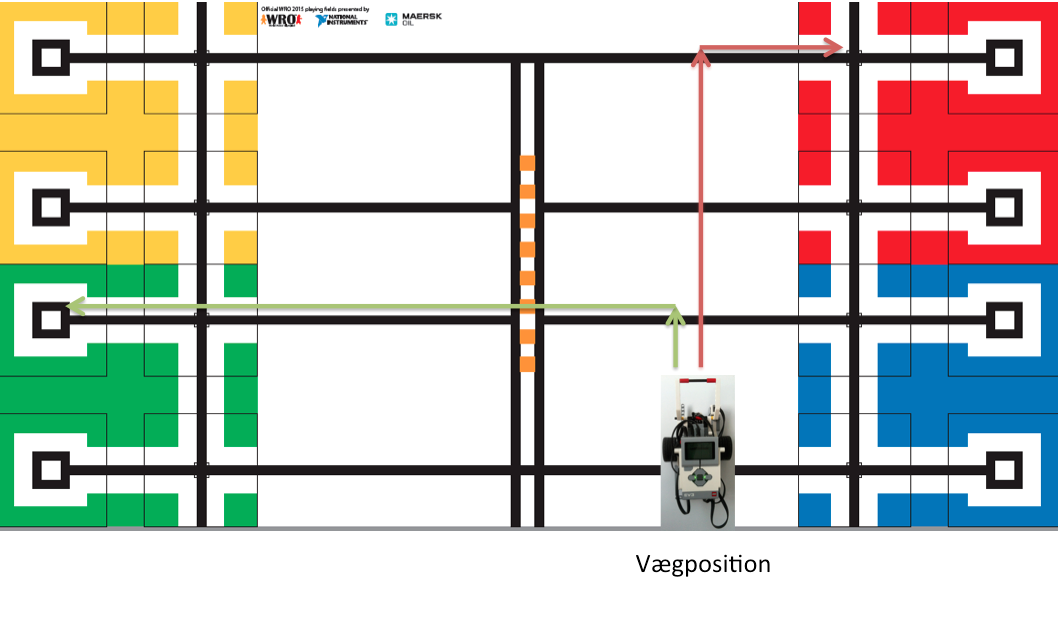
Prøv i første omgang at få programmet wroRegular.ev3p til at styre WRO Starter Bot 2015 som på videoen. Husk at armen skal være i vandret position ved starten: Ideen bag den måde wroRegular.ev3p styrer robotten imellem de forskellige placerings- og anbringelsespositioner er at robotten hver gang den har hentet eller anbragt en kube kører til en position ved kanten af banen, kaldet vægpositionen, som vist her: Fra vægpositionen bruger programmet så de sorte streger på banen til at vælge forskellige ruter ud til de forskellige placerings- og anbringelsespositioner eksempelvis som vist med pilene.
Prøv at se hvilke ruter robotten følger ved at bruge forskellige kombinationer af de 8 farvede felter som så får wroRegular.ev3p til at hente kuber med forskellige farver i det røde område og bringe kuben til forskellige anbringelsespositioner. For at kunne udvide programmet, så de tre andre kuber også bliver hentet og placeret korrekt er det nødvendigt at kende til programmets struktur og detaljer. Når wroRegular.ev3p åbnes ser det sådan her ud: Programmet består af 4 blokke:
|