GetBlue, en brugerdefinet programmeringsblok,
fċr robotten til at kĝre hen til den blċ Recycle Container, lĝfte den op og kĝre tilbage
til den sorte streg ud for det blċ Container Area,
som det ses pċ videoen:
I videoen styres
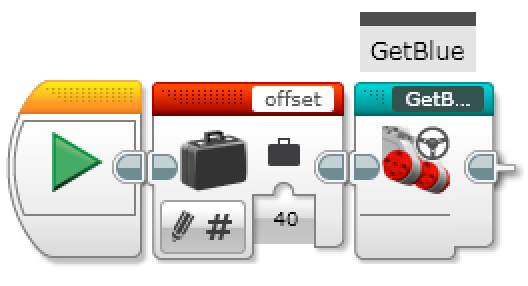
WRO Starter Bot 2016 af et program som ser sċdan her ud:
Programmet bestċr af 2 blokke:
Den fĝrste blok er en variabel-blok, som sĉtter en variabel kaldet offset til 40 (se eventuelt
EV3 hjĉlp > Programmeringsblokke > Data-blokke > Variabel). Vĉrdien af offset skal vĉre den lysvĉrdi
farvesensoren pċ port 3 registrerer over kanten af en af de sorte streger pċ banen, se
Fĝlg kanten af en sort streg.
Den nĉste blok, kaldet GetBlue, fċr robotten til at kĝre hen til den blċ Recycle Container, lĝfte den op og kĝre tilbage
til den sorte streg ud for det blċ Container Area.
Den fĝrste blok, DriveEdgeTo,
fċr robotten til at kĝre langs den sorte streg og stoppe ved kanten af det blċ omrċde:
De nĉste 3 blokke, OpenGrab, MoveCm og
LiftContainer,
fċr robotten til at ċbne grabben, kĝre frem til den blċ container og lĝfte containeren:
De 2 sidste blokke, MoveCm og
DriveToColor,
fċr robotten til at kĝre 30 cm baglĉns og dernĉst bakke til farvesensoren pċ port 4 registrerer den sorte streg: