PlaceBlue - WRO Starter Bot bringer blċ Recycle Container tilbage
PlaceBlue, en brugerdefinet programmeringsblok,
fċr robotten via de sorte streger tilbage til det blċ Container Area, hvor den blċ Recycle Container placeres, sċ den rĝrer den blċ firkant
i midten af omrċdet,
som det ses pċ videoen:
I videoen styres
WRO Starter Bot 2016 af et program som ser sċdan her ud:
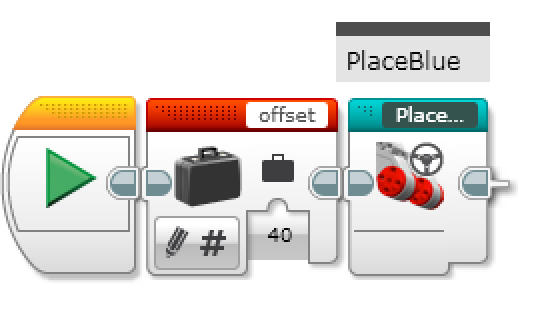
Programmet bestċr af 2 blokke:
Den fĝrste blok er en variabel-blok, som sĉtter en variabel kaldet offset til 40 (se eventuelt
EV3 hjĉlp > Programmeringsblokke > Data-blokke > Variabel). Vĉrdien af offset skal vĉre den lysvĉrdi
farvesensoren pċ port 3 registrerer over kanten af en af de sorte streger pċ banen, se
Fĝlg kanten af en sort streg.
Den nĉste blok, kaldet PlaceBlue, fċr robotten via de sorte streger tilbage til det blċ Container Area,
hvor den blċ Recycle Container placeres, sċ den rĝrer den blċ firkant i midten af omrċdet.
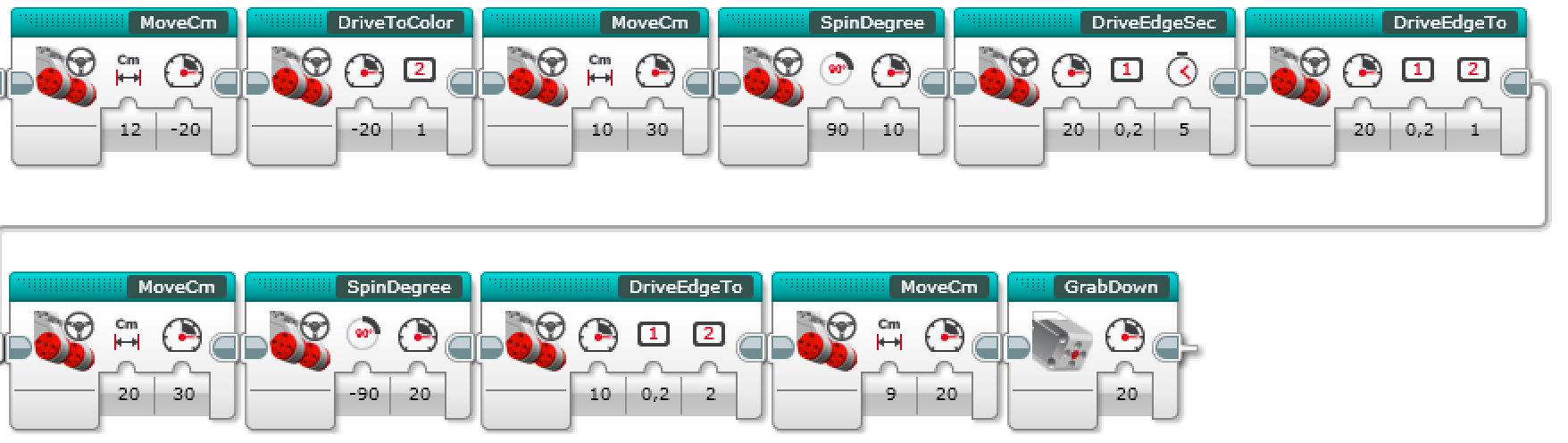
Ċbnes blokken PlaceBlue ser indholdet sċdan her ud:
De 2 fĝrste blokke, MoveCm og DriveToColor,
fċr robotten til at bakke 12 cm og dernĉst bakke indtil sensoren pċ port 4 registrerer
kanten af den sorte streg:
De nĉste 2 blokke,
MoveCm
og SpinDegree,
fċr robotten til at kĝre 10 cm frem og dreje til hĝjre 90 grader, sċ robotten er klar til
at fĝlge kanten af den sorte streg tilbage:
De 2 nĉste blokke, DriveEdgeSec og DriveEdgeTo,
fċr robotten til at fĝlge den sorte streg indtil den sorte tvĉrstreg inden det blċ omrċde:
De 2 nĉste blokke, MoveCm
og SpinDegree,
fċr robotten til at kĝre 20 cm frem og dreje 90 grader til venstre, sċ robotten
er klar til at fĝlge den sorte tvĉrstreg til det blċ omrċde:
De 3 sidste blokke, , DriveEdgeTo, MoveCm
og GrabDown,
bringer robotten langs stregen til det blċ omrċde, hvor containeren placeres, sċ den rĝrer den blċ firkant i midten af omrċdet: