![]()
Sidst opdateret 28.6.16.
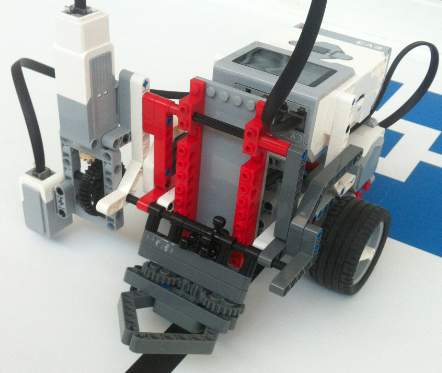
Bygning af WRO Starter Bot 2016WRO Starter Bot ser sådan ud (klik på billedet for at se detaljer):Start med at bygge en simpel robot basebil (klik på billedet for at se detaljer): Udgangspunktet er delene i LEGO EV3 Core Set 45544 og byggevejledningen som følger med sættet: Robot basebilen bygges ved at følge vejledningen fra trin 1 til trin 45, dog skal de vinklede teknikbjælker som påmonteres de to motorer i trin 2 og trin 15 erstattes af en lige teknikbjælke med 13 huller som vist på billedet til højre: De to store motorer, som driver hjulene, skal forbindes til de to porte B og C, som vist i byggevejledningen trin 43 og 44. Nu kan robot basebilen udbygges til WRO Starter Bot 2016 ved at bygge og påmontere enkeltdele sådan her:
Afprøvning af sensorer og motorerInden WRO Starter Bot 2016 programmeres kan det være nyttigt
Vælg dernæst Generelt og vælg Hardwareside: Under Hardwareside find Portvisning: I Fanen Portvisning ses altså hvilke motorer og sensorer, som er tilsluttet portene på EV3. Eksemplet viser, at to store motorer er tilsluttet port A og B og en tryksensor er tilsluttet port 4. Når WRO Starter Bot 2016 er forbundet med USB (eller forbundet trådløst) til en PC, kan portvisningen altså vælges ved at klikke på Fanen Portvisning i nederste højre hjørne af programmeringsværktøjet. Placeres robotten f.eks. som vist på billedet med farvesensor på port 4 over et rødt felt og farvesensor på port 3 over hvid fås en Portvisning, som kan se sådan her ud: SensorerPå WRO Starter Bot 2016 benyttes kun sensorer på port 3 og 4 og begge porte er tilsluttet en farvesensor. Derfor ses symbolet for en farvesensor i Portvisning for port 3 og 4. For at forstå hvad de to tal, 66 og 5, ud for port 3 og 4 betyder, vælg igen Vis EV3 hjælp og under Generelt vælg Farve:Under Brug af farvesensoren ses, at farvesensoren kan bruges i en af tre tilstande og betydningen af det tal farvesensoren registrerer afhænger af tilstanden: Tilstanden for en farvesensor vælges under porten i Portvisningen: Tilstanden for de to farvesensorer i visningen ovenfor er for port 3 Intensitet af reflekteret lys og for port 4 er tilstanden Farve. Det kan ses på symbolerne ud for de to farvesensorer i Portvisning. De to værdier skal derfor fortolkes, som vist i denne tabel fra Brug af farvesensoren: Tallet 66, som registreres af farvesensoren på port 3, viser altså en lysprocent og den høje værdi passer med, at sensoren er over en lys overflade. Tallet 5, som registreres af farvesensoren på port 4, viser altså en farve og i tabellen ses, at farven svarende til tallet 5 er rød. Det passer jo også med, at farvesensoren er over et rødt felt. Opgave 1: Prøv at undersøge om det de to farvesensorer registrerer over de øvrige felter og over sorte streger passer med fortolkningen i tabellen. Portvisning på EV3 skærmI EV3 brugervejledning, side 26, forklares under EV3-klodsgrænsefladen, hvordan Portvisning også kan foregå på EV3 skærmen. Det betyder, at Portvisning kan foregå uden at EV3'en er forbundet til en PC.MotorerI Portvisning for WRO Starter Bot 2016 ses, at en mellemstor motor er tilsluttet port A og to store motorer er tilsluttet port B og C.Med Portvisning er det muligt at undersøge motoromdrejningssensorerne på de tre motorer: Opgave 2: Prøv at dreje på de to hjul og bevæge grabben på WRO Starter Bot 2016. Hvad sker med tallene ud for de tre motorporte?En forklaring på tallene ud for de tre motorporte kan findes under Brug af motoromdrejningssensoren under EV3 Hjælp, Generelt og Brug af sensorer: Motorstyring med EV3 knapperPortvisning for motorerne kan også ske fra EV3'en fra EV3-klodsgrænsefladen som for sensorerne, men for motorerne er der også mulighed for ved hjælp af knapperne på EV3 at styre motorerne. Vælg Motorstyring som forklaret på side 26 i EV3 brugervejledning. |