![]()
Sidst opdateret 3.8.17.
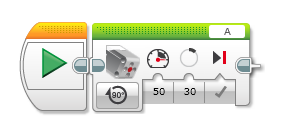
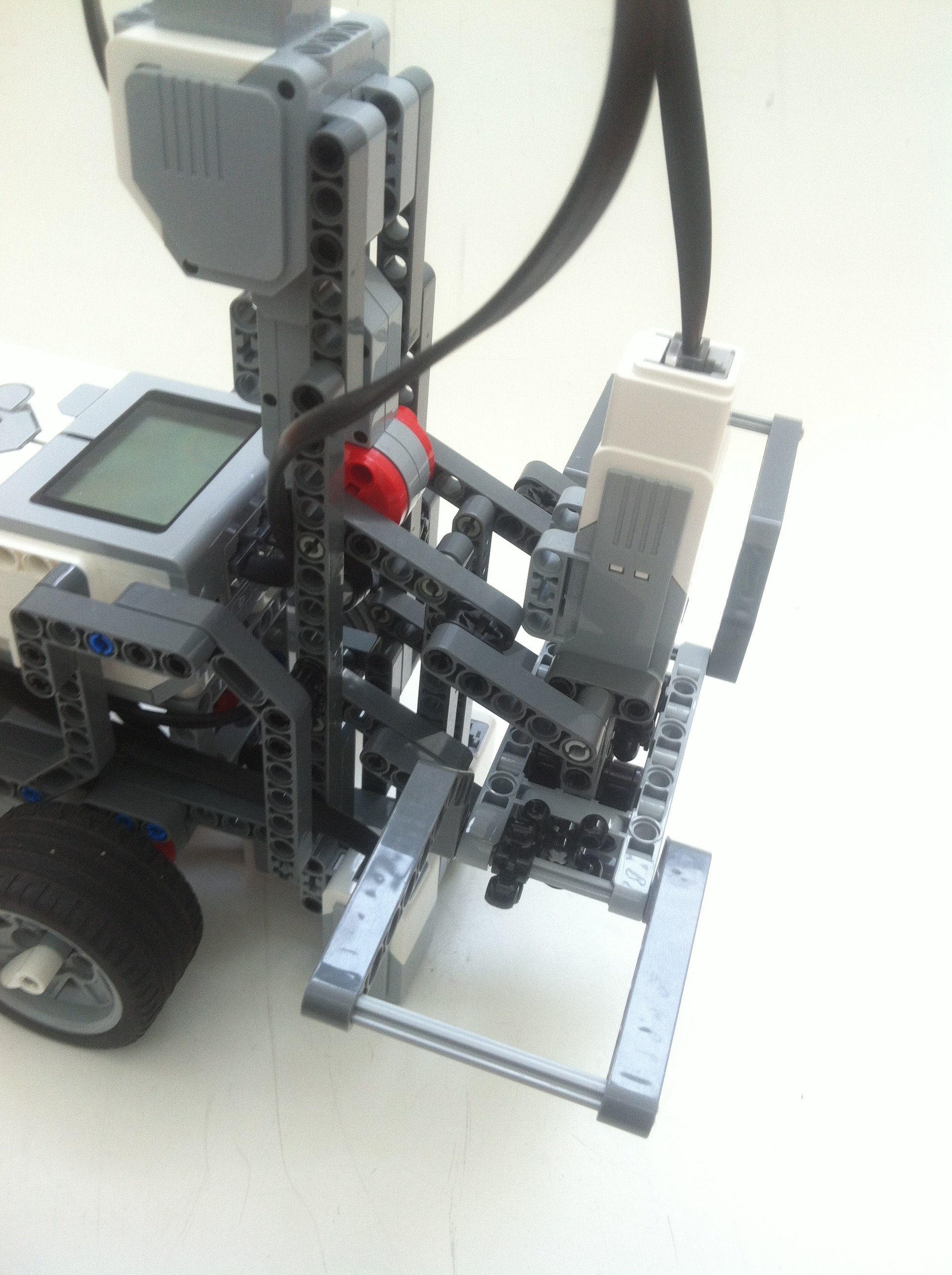
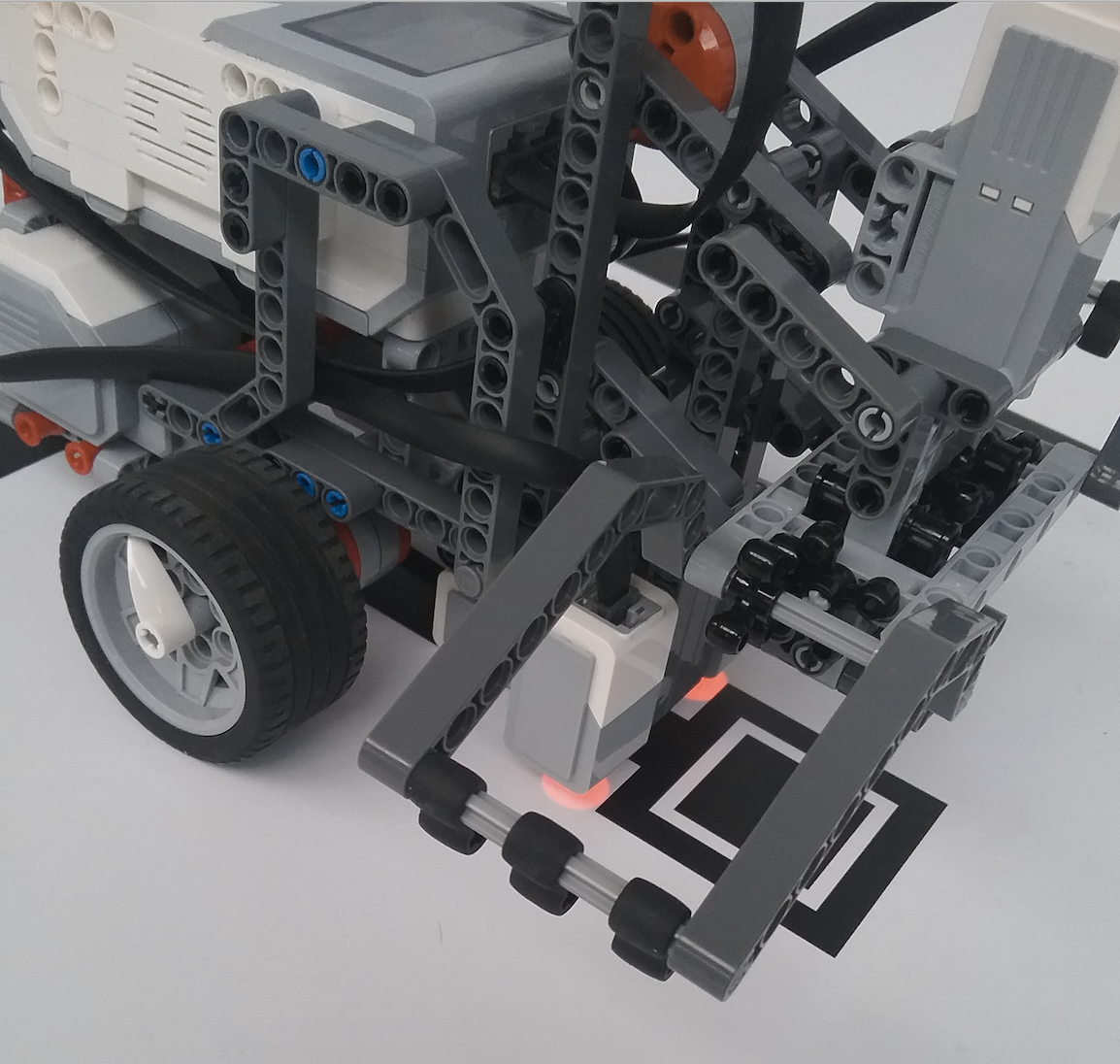
Programmering af křrsel med WRO Starter Bot 2017Prřv at se, hvordan WRO Starter Bot 2017 křrer ved at bruge et simpelt program med blot en programmeringsblok, en bevćgelsesstyring-blok:Programmet fĺr robotten til at křre fremad. Hjulene roterer en omdrejning inden robotten stopper. Hold řje med den hvide "pil" inde i hjulene, som viser, at der netop křres en omdrejning.
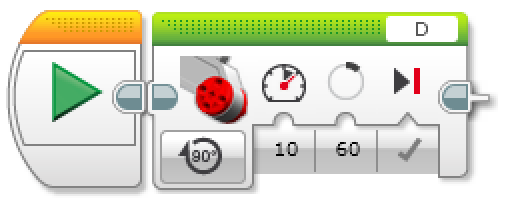
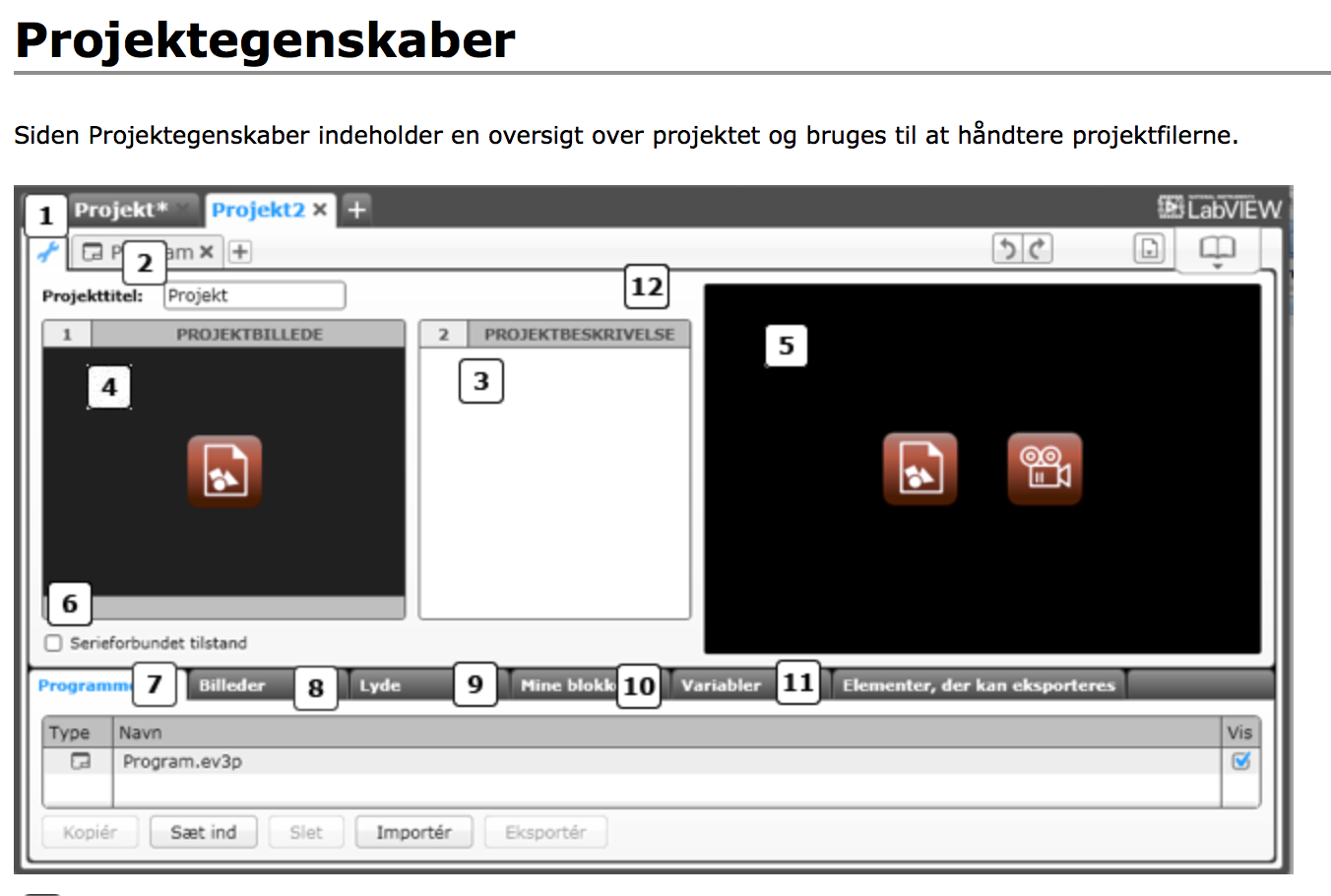
Opgave 1: De forskellige indstillingsmuligheder i bevćgelsesstyring-blokken er beskrevet i EV3 hjćlp. Find beskrivelsen ved i programmeringsvćrktřjet at gĺ ind i Vis EV3 hjćlp: Vćlg dernćst Programmeringsblokke og under Handlingsblokke vćlg Bevćgelsesstyring: Prřv at sćtte flere bevćgelsesstyring-blokke efter hinanden og fĺ pĺ den mĺde robotten til f.eks. at křre et stykke frem og sĺ bakke det samme stykke tilbage. Programmering af grab motorPrřv at undersřge, hvordan den mellemstore motor pĺ WRO Starter Bot 2017 bevćger grabben. Brug et simpelt program med blot en programmeringsblok, en mellemstor motor-blok:Den mellemstore motor er sat til at dreje 30 grader med Strřm 50. Stil grabben sĺdan her: Sĺ kan det ses om grabben bevćger sig op eller ned.
Opgave 2:Mĺske er det en ide at kigge i EV3 hjćlp for mellemstor motor-blok: Programmering af lřfte/sćnke motorPrřv at undersřge, hvordan den store motor pĺ WRO Starter Bot 2017 bevćger grabben. Brug et simpelt program med blot en programmeringsblok, en stor motor-blok:Den store motor er sat til at dreje 60 grader med Strřm 10. Stil grabben sĺdan her: Grabben bliver lřftet, men efter kort tid sćnkes grabben igen, hvorfor?
Opgave 3:Mĺske er det en ide at kigge i EV3 hjćlp for stor motor-blok: Programmering af gribe og lřfteHvis bĺde den store lřfte motor og den mellemstore grab motor tages i brug kan bĺde en stor og en lille kube lřftes af dette program:som det ses pĺ de to videoer:
Bemćrk, at der er monteret 6 gummiklodser pĺ de to akser pĺ grabben, sĺ grabben kan fastholde kuberne i lřftet: Elastikker kan nok ogsĺ bruges
Opgave 4: Registrering af farve pĺ kubeFarvesensoren pĺ port 3 kan bruges til at registrere farven pĺ de forskellige kuber. Pĺ de to videoer ses, hvordan robotten křrer frem til en stor og en lille kube, lřfter "lĺgen" foran farvesensoren for dernćst at "sige" farven pĺ kuben:
Nĺr robotten křrer ind i en kube med "lĺgen" foran farvesensoren sćnket, vil fladen pĺ de smĺ kuber ogsĺ komme til at stĺ med en flade nogenlunde vinkelret pĺ farvesensorens retning. Dette sikrer en rimelig stabil registrering af kubens farve.
Opgave 5: |