![]()
Sidst opdateret 7.9.18.
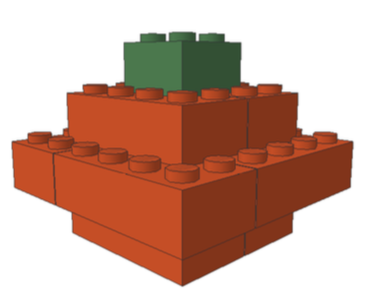
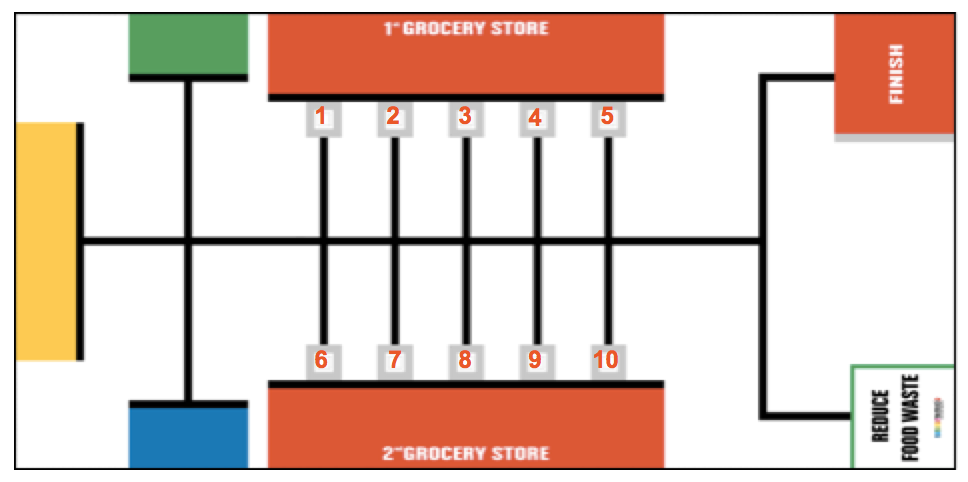
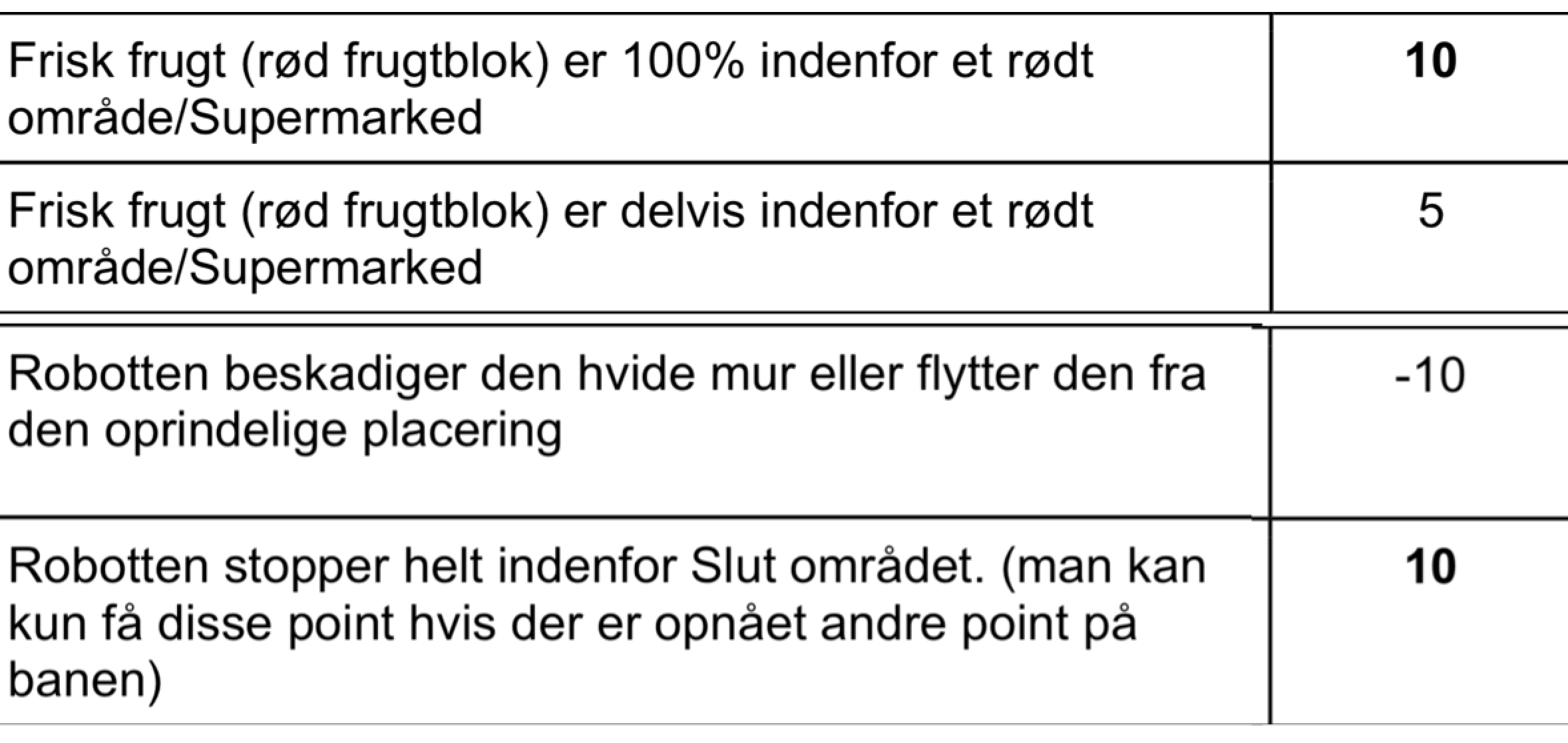
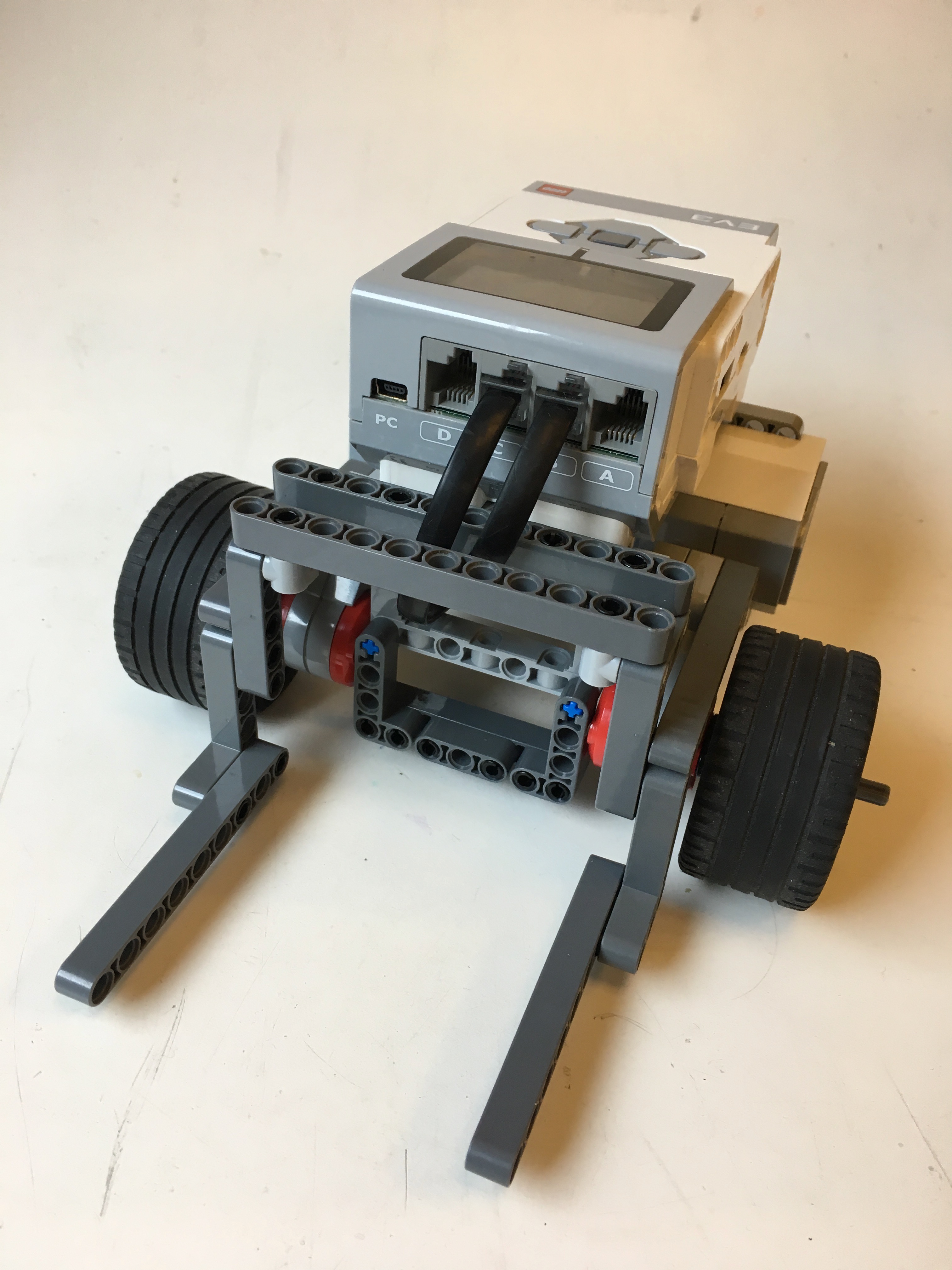
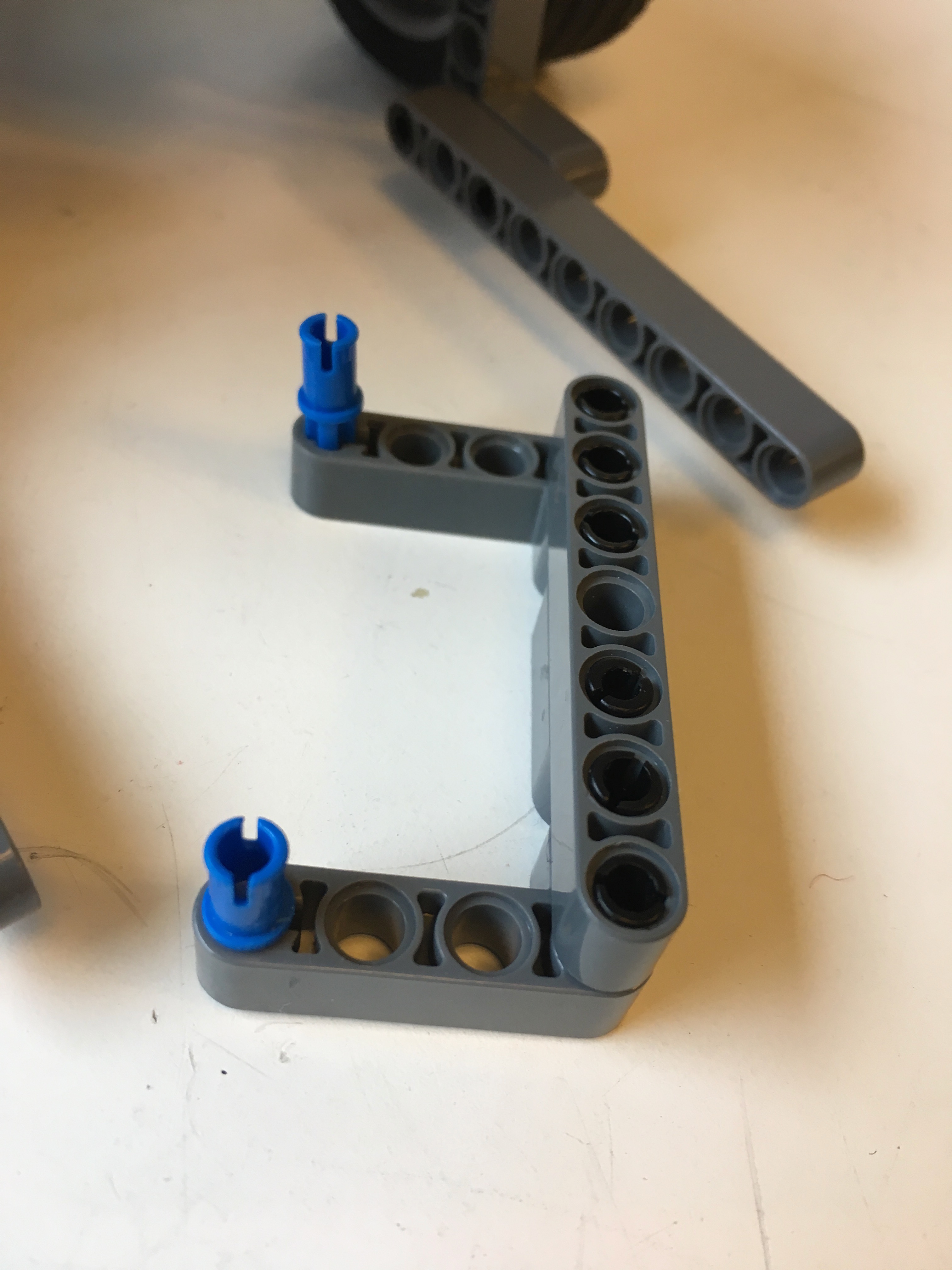
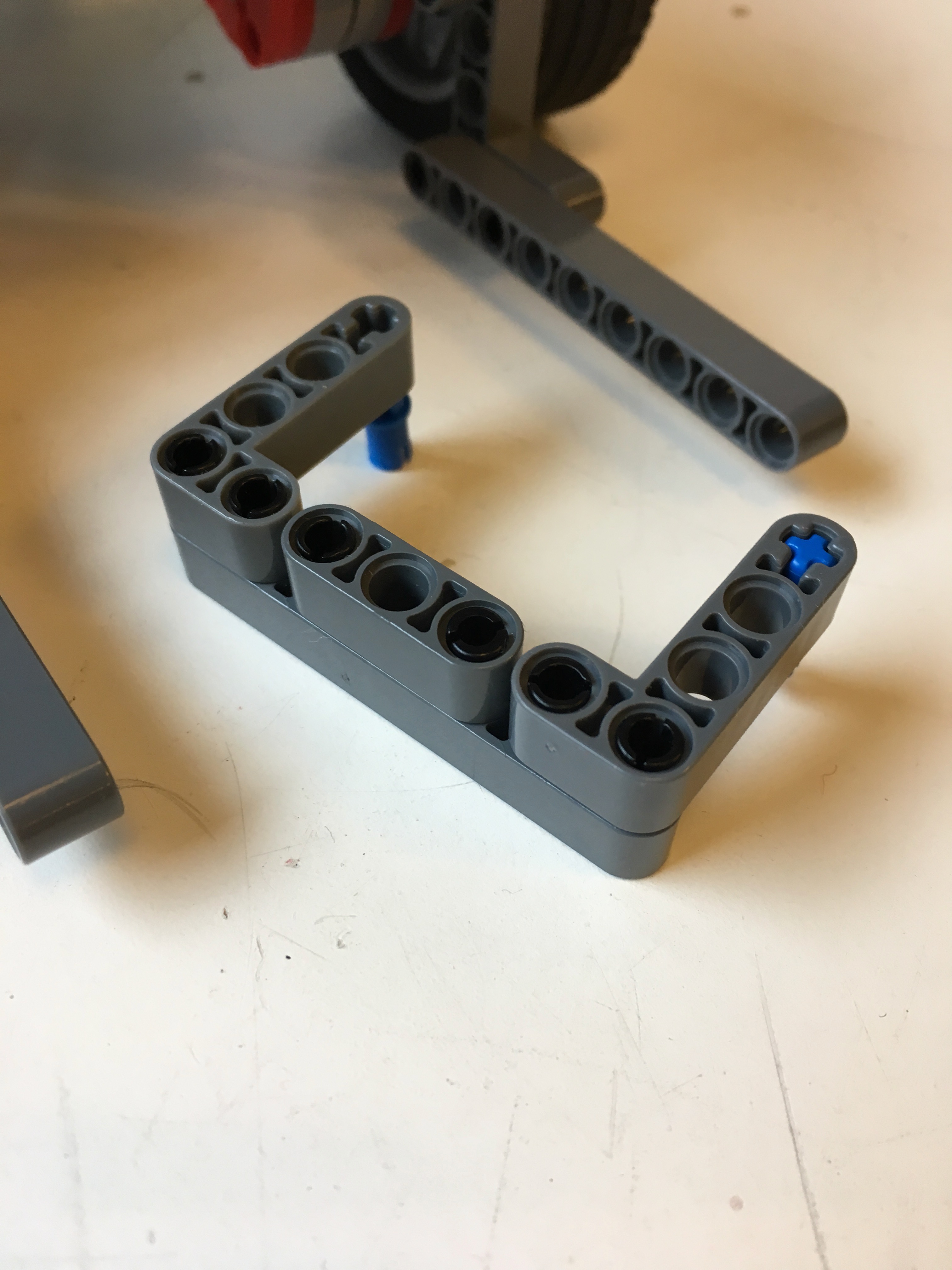
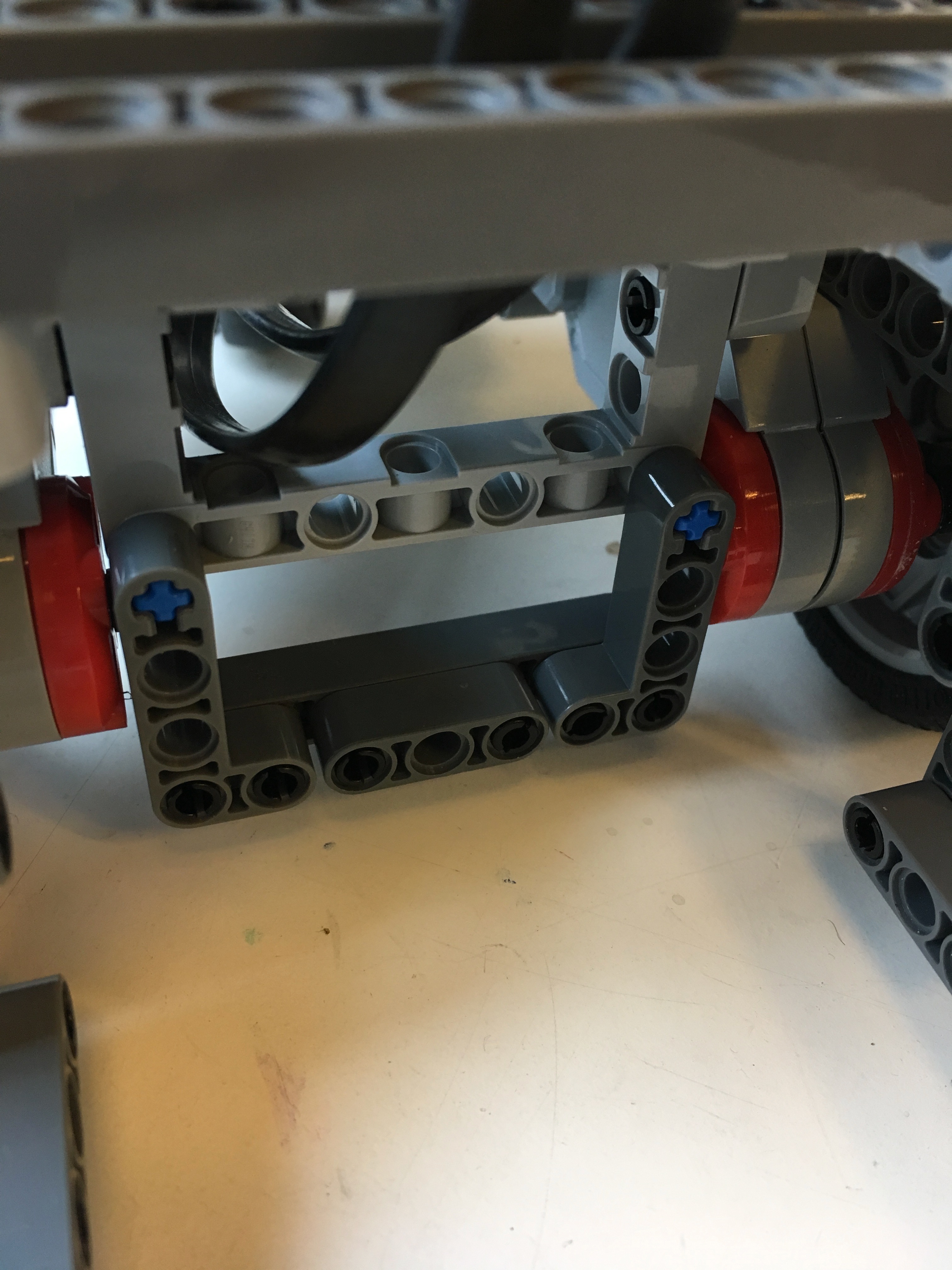
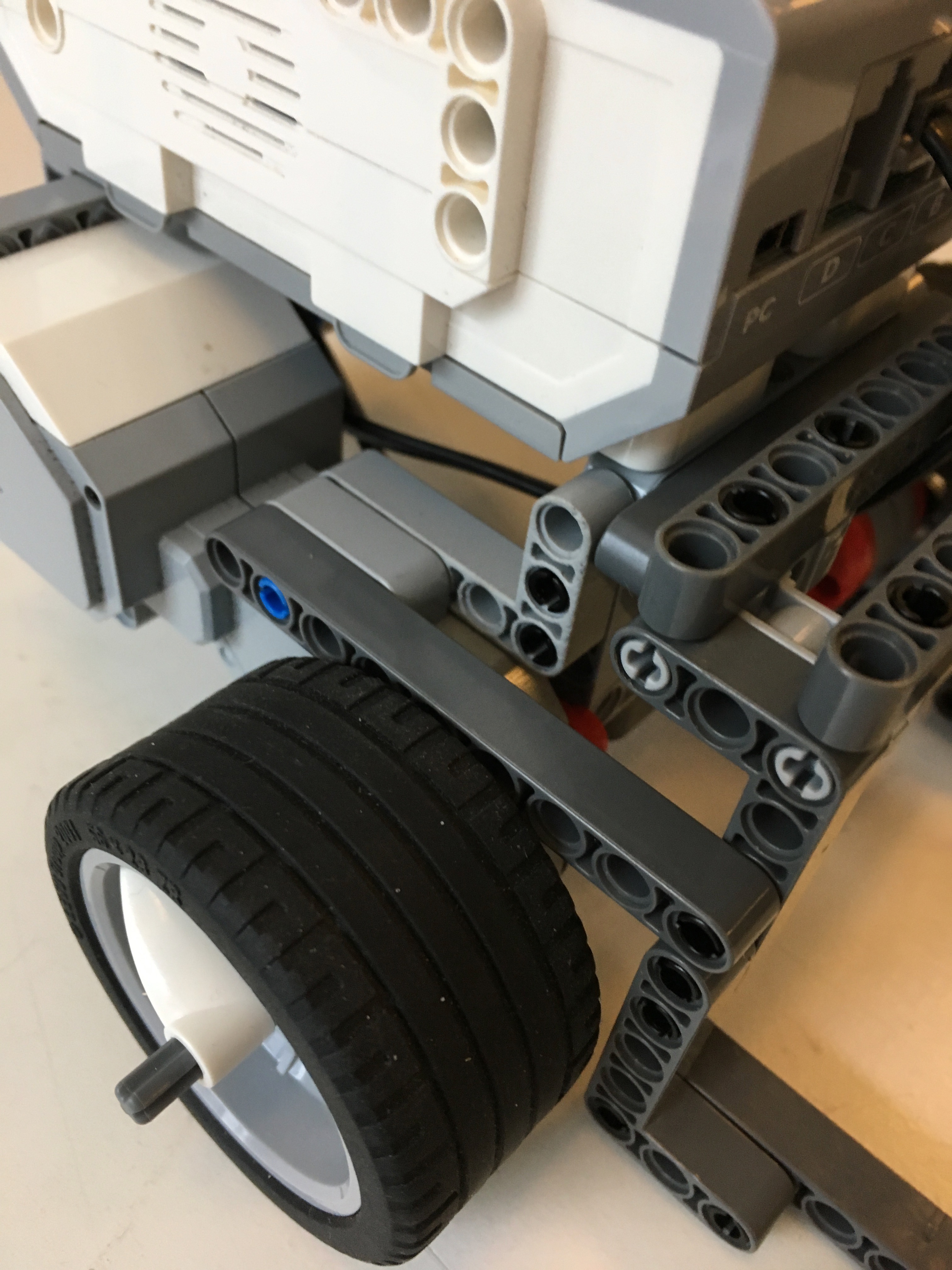
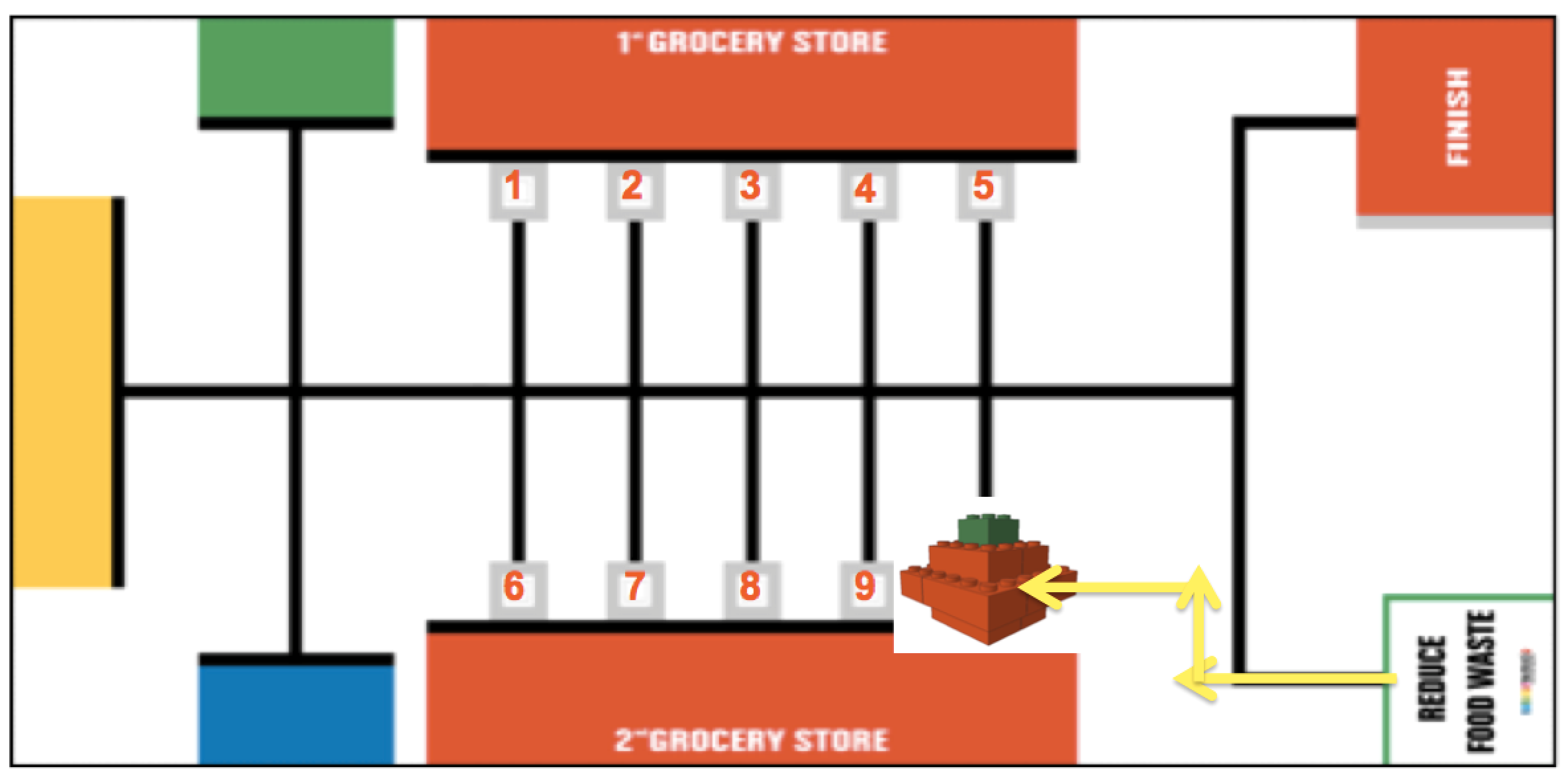
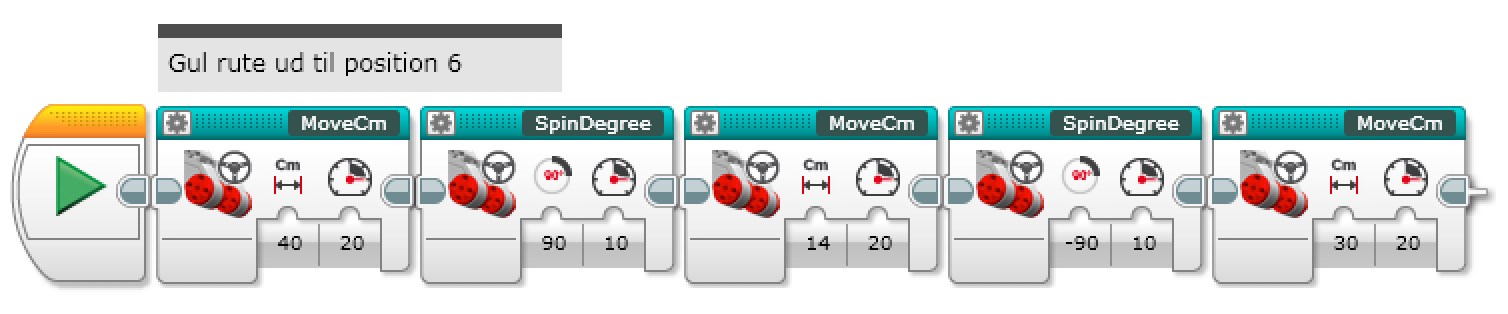
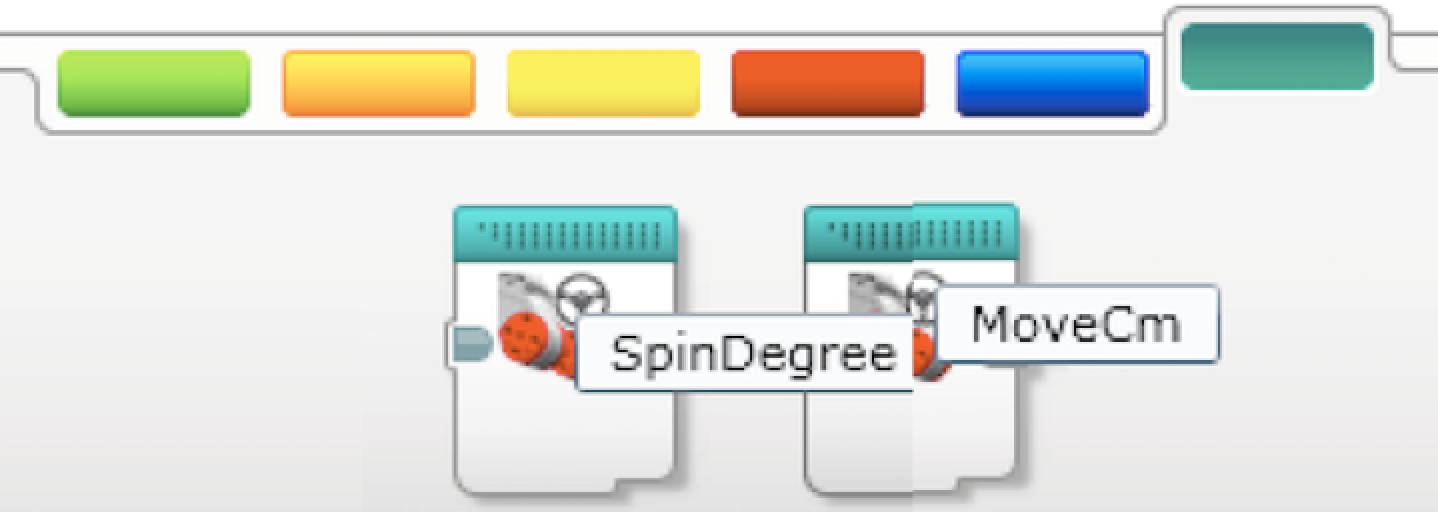
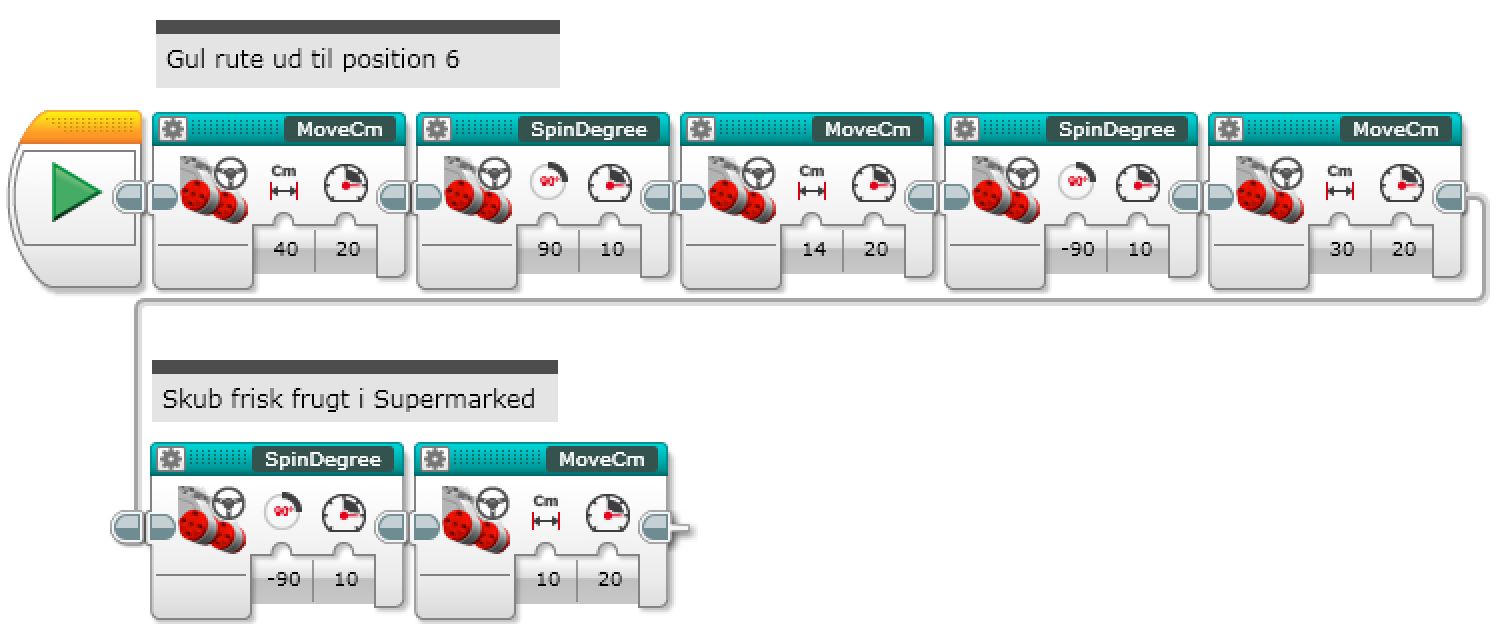
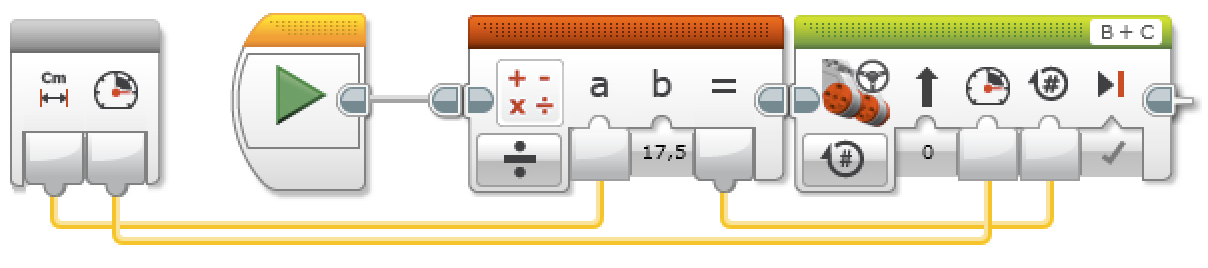
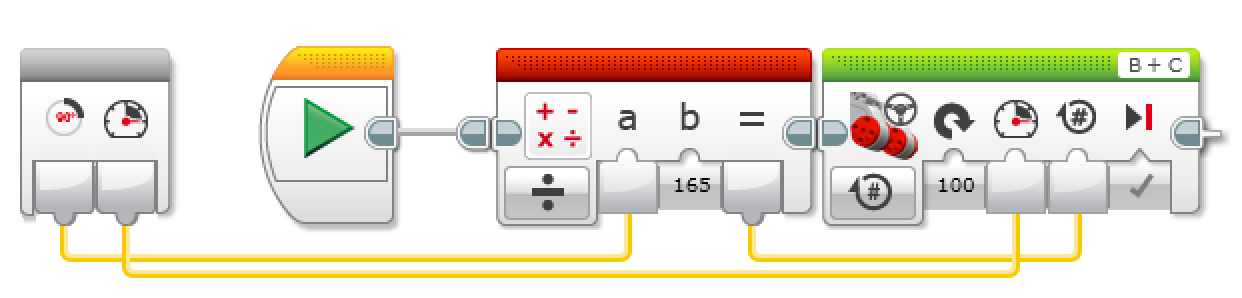
Robotudfordring trin 1I udfordringen er et styk frisk frugt:placeret i positionen mćrket 10 pĺ banen: Den rřde frugt skal transporteres til et af de to Supermarkeder (et af de to rektangulćre rřde omrĺder mćrket GROCERY STORE). Robotten skal starte i Start omrĺdet (det hvide omrĺde i nederste hřjre hjřrne med to grřnne linier som kant) og robotten skal slutte i Slut omrĺdet (det rřde omrĺde i řverste hřjre hjřrne mćrket FINISH). Udfordringen skal klares pĺ under 2 minuter. Pointgivning for de enkelte robotopgaver pĺ banen i udfordringen pĺ trin 1 er: Der kan altsĺ maksimalt opnĺs 20 point for udfordringen pĺ trin 1. De detaljerede regler kan ses her. Mange lřsningerUdfordringen pĺ trin 1 kan lřses pĺ utroligt mange mĺder, se f.eks. her hvor basisrobotten er udbygget med en simpel skubbemekanisme som bruges til at skubbe frugten ind i Supermarkedet:Ruten robotten křrer bestĺr blot af to ligeudkřrsler og et drej pĺ stedet. Uanset, hvilken lřsning der vćlges skal der bygges og programmeres. I det fřlgende foreslĺs et skubbestativ, som ogsĺ kan bruges, nĺr flere frugter skal indsamles, altsĺ et stativ som er forberedt til udfordringerne pĺ de nćste trin. Der gives ogsĺ forslag til mĺder at programmere pĺ som er nyttige, nĺr udfordringerne bliver vanskeligere og programmerne derfor bliver střrre og mere komplicerede. Bygning og programmering af robot til trin 1 udfordringenForslaget til en robot til trin 1 udfordringen ser sĺdan ud (klik pĺ billedet for at se detaljer):Basisrobotten er blevet udbygget med et skubbestativ, sĺ robotten kan indfange og skubbe den rřde frugt ind i et Supermarked, som det ses pĺ denne video: Bygning af skubbestativ til basisrobottenBasisrobotten skal udbygges ved at pĺmontere et skubbestativ (klik pĺ billedet for at se detaljer): Skubbestativet kan bygges ved at fřlge en byggevejledning. Sidst i vejledningen ses en liste over de LEGO elementer stativet er bygget af. Byggevejledning for skubbestativet er lavet ved hjćlp af vćrktřjet LEGO Digital Designer (LDD). Byggevejledningen findes i filen stativ.lxf. Det kan vćre en fordel at bruge byggevejledning i filen til at bygge efter, da det giver mulighed for at dreje LEGO modellerne pĺ skćrmen under byggeprocessen. Inden filen kan bruges, skal LDD installeres pĺ maskinen. Nĺr en byggevejledning er ĺbnet i LDD fĺs de enkelte trin i byggeprocessen ved at klikke pĺ knappen "Building guide mode" řverst til hřjre. Inden skubbestativet pĺmonteres basisrobotten, skal der sćttes en stopper under basisrobotten som vist her (klik pĺ billedet for at se detaljer): Stopperen forhindrer den rřde frugt i at glide for langt ind under robotten, nĺr frugten skubbes af robotten. Nĺr skubberen under robotten er kommet pĺ plads, monteres skubbestativet. Inden monteringer tages de to motorledninger ud fra port B og C. Efter monteringen fřres de to ledninger ind imellem de to tvćrgĺende teknikbjćlker som vist til hřjre (klik pĺ billedet for at se detaljer): Programmering af udfordring pĺ trin 1Start med at planlćgge en rute fra Start omrĺdet ud til positionen for den friske frugt, mćrket 10. F.eks. som denne rute markeret med gule pile:Robotten kan křre langs ruten hvis den bliver programmeret til at křre sĺdan her: Nĺr robotten har křrt ruten skulle den friske frugt vćre indfanget imellem benene af skubbestativet. Opgave 1: Brug 5 bevćgelsesstyring-blokke til at fĺ robotten til at křre langs den gule rute ud til den friske frugt. Opgave 2: Planlćg nu en lignende rute for robotten fra positionen ved den friske frugt, sĺ robotten ved at křre ruten transporterer den friske frugt til et af de to Supermarkeder. Planlćg dernćst en rute, sĺ robotten křrer til Slut omrĺdet. Brug af brugerdefinerede blokke: MoveCm og SpinDegreeNĺr en rute, f.eks. den gule rute ud til den friske frugt, skal programmeres, er det noget besvćrligt at mĺle strćkninger og drejningsgrader i hjulomgange, som jo bruges i bevćgelsesstyring-blokke. I stedet kunne den gule rute programmeres udelukkende ved at bruge de to brugerdefinerede blokke MoveCm og SpinDegree sĺdan her:Programmet, kaldet gulRute, kan findes i EV3 projektet Trin1.ev3. Med blokkene MoveCm og SpinDegree kan strćkninger i ruten angives i cm og drej pĺ stedet angives i antal grader robotten skal dreje: Den fřrste MoveCm blok fĺr robotten til at křre 40 cm ligeud med hastighed 20. Den nćste blok, SpinDegree, fĺr robotten til at dreje pĺ stedet til hřjre 90 grader med hastighed 10. Sĺ křrer robotten 14 cm ligeud, drejer til venstre 90 grader (-90 grader betyder til venstre) inden robotten křrer 30 cm ligeud hen til frugten. Pĺ videoen ses hvordan robotten křrer den gule rute, nĺr robotten fřlger programmet gulRute: Se eventuelt EV3 Hjćlp > Funktioner > Min blokbygger: Brugen af de brugerdefinerede programmeringsblokke: MoveCm og SpinDegree gřr det altsĺ muligt at bruge cm og drejningsvinkler i grader. En anden fordel ved de brugerdefinerede blokke er, at de to brugerdefinerede blokke kan bruges andre steder i programmeringen af robotten f.eks. nĺr ruten fra Supermarkedet til Slut omrĺdet skal programmeres. Blokkene kan findes i den turkis mappe i EV3 projektet Trin1.ev3: Skal den friske frugt f.eks. skubbes ind i det nćrmeste Supermarked, kan programmet gulRute udvides, sĺ robotten drejer pĺ stedet over mod Supermarkedet og skubber frugten ind i det rřde omrĺde som det ses pĺ videoen: Programmet som styrer robotten pĺ videoen ser sĺdan her ud: Opgave 3: Planlćg en rute, sĺ robotten efter at have křrt den friske frugt ind i Supermarkedet křrer til Slut omrĺdet. Programmér ruten ved blot at forlćnge programmet ovenfor under brug af blokkene MoveCm og SpinDegree. MoveCm og SpinDegree er unřjagtigeNĺr blokkene MoveCm og SpinDegree bruges kan det vćre, at de ikke er sĺ nřjagtige i deres křrsel, som de kunne vćre. Robotten drejer ikke helt 90 grader eller křrer lćngere end 40 cm. For at fĺ en sĺ nřjagtig křrsel som mulig skal der ikke benyttes hřje hastigheder. F.eks. start med hastighed 20 i MoveCm og hastighed 10 i SpinDegree.Hvis ikke det hjćlper at křrer langsomt, skal der rettes i de to konstanter, som indgĺr i omregningerne i MoveCm og SpinDegree fra cm og grader til hjulomdrejninger. Det sker ved at ĺbne de to blokke og rette konstanterne:
I Programmering af křrsel langs en rute beskrives de to blokke i střrre detalje MoveCm og SpinDegree. |