![]()
Sidst opdateret 13.9.18.
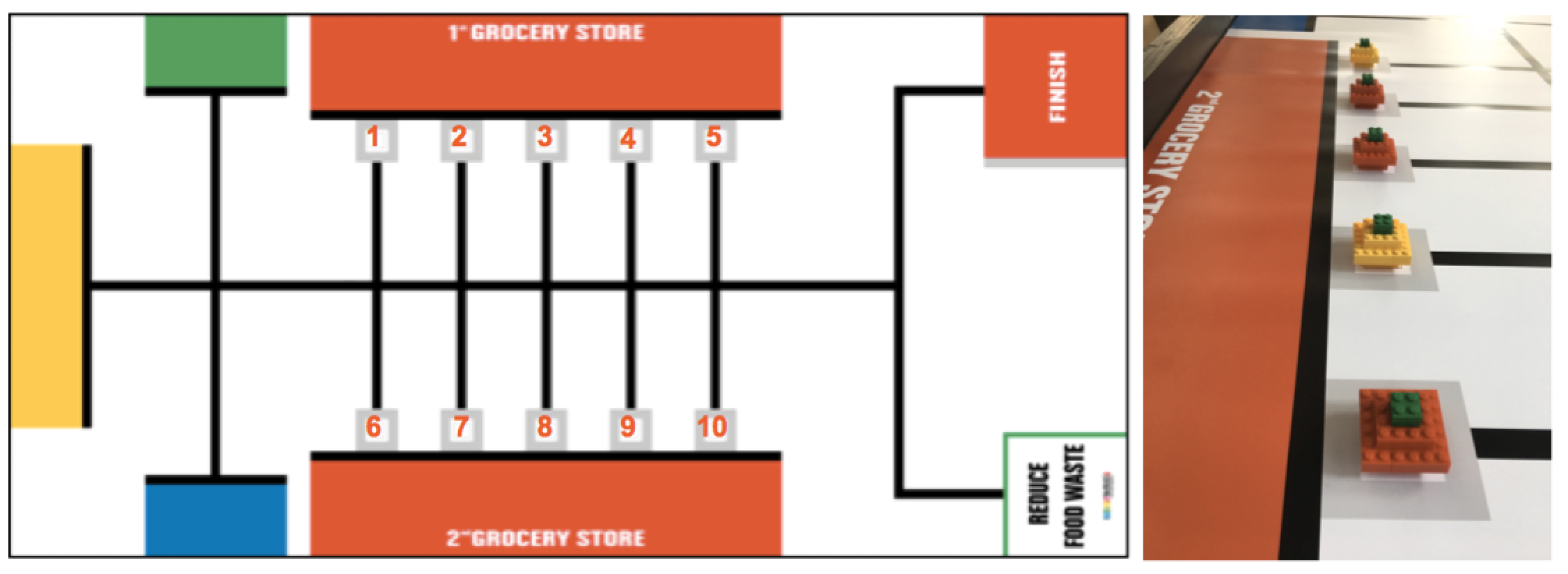
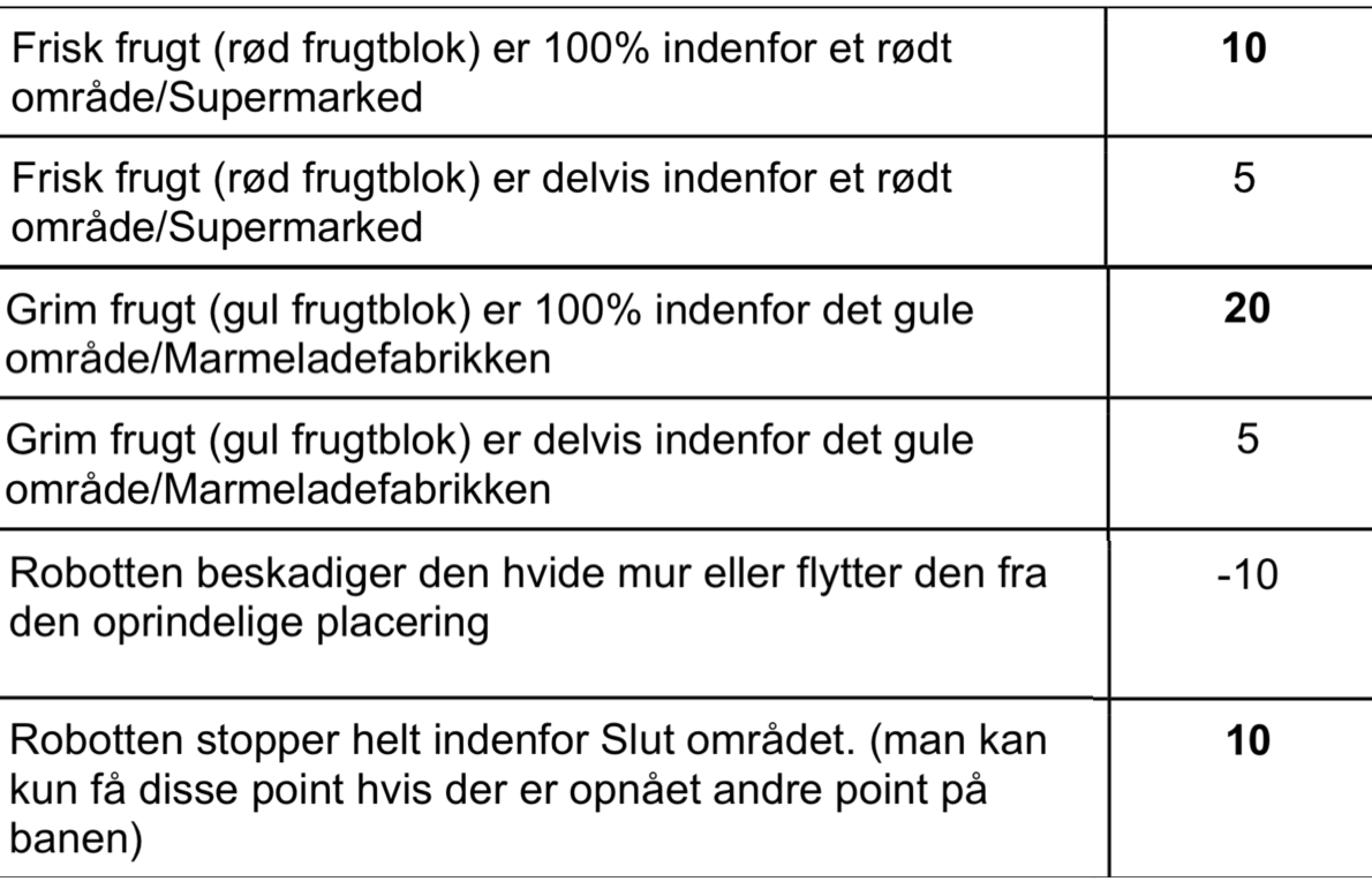
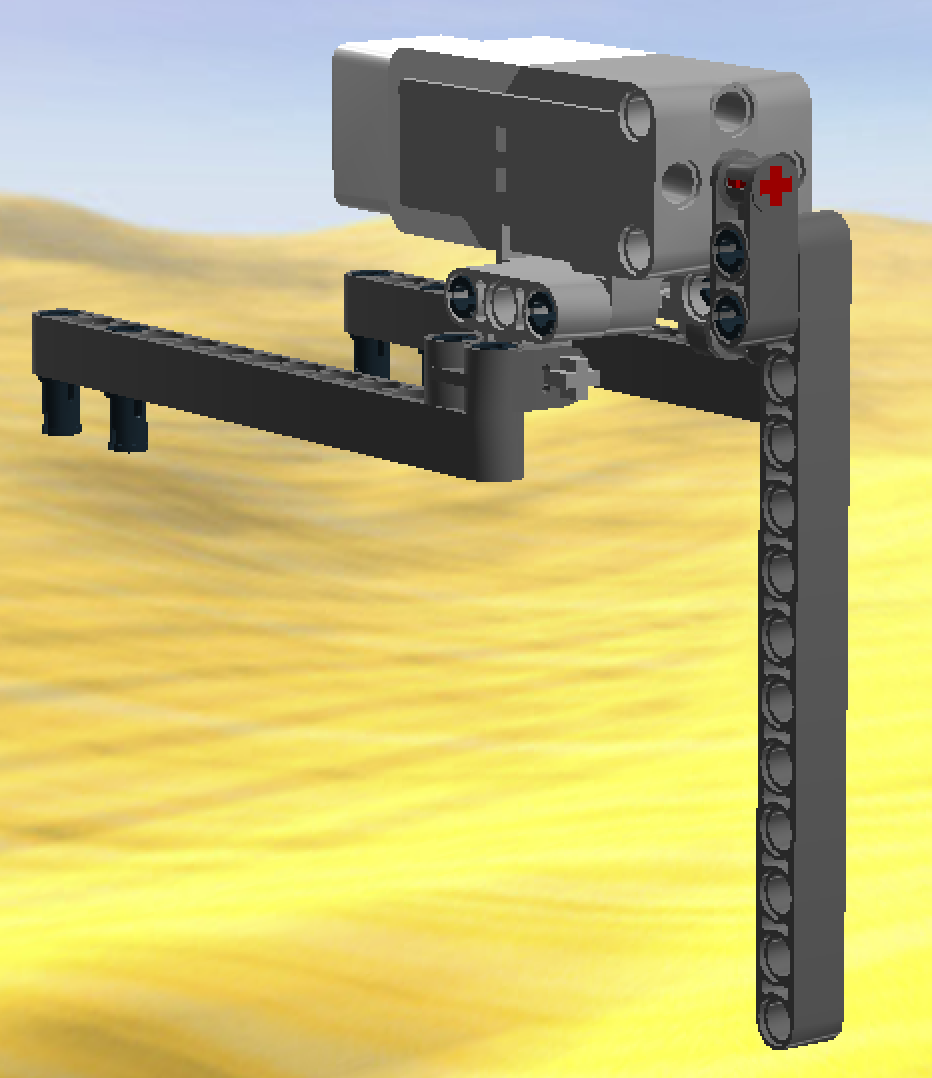
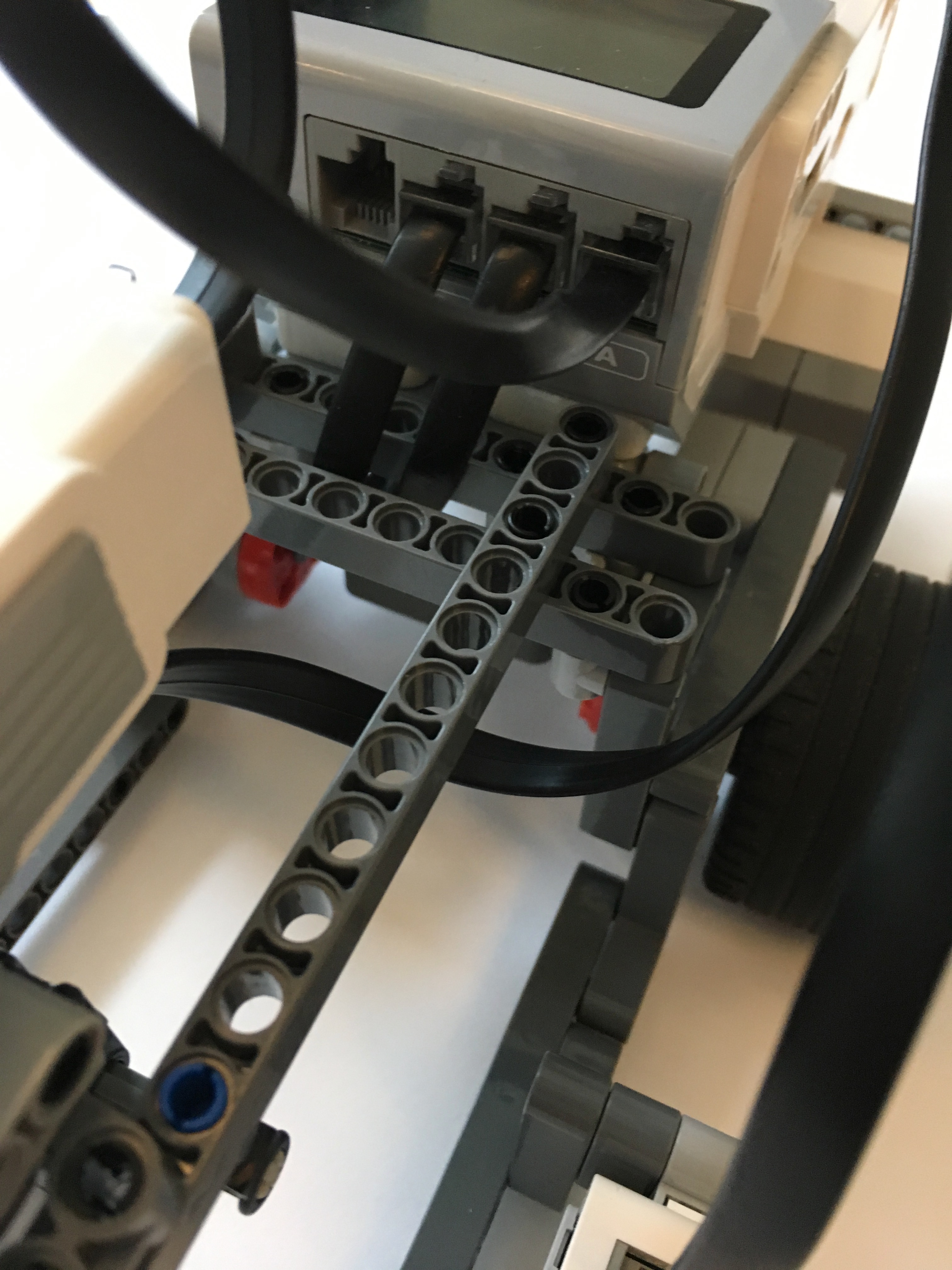
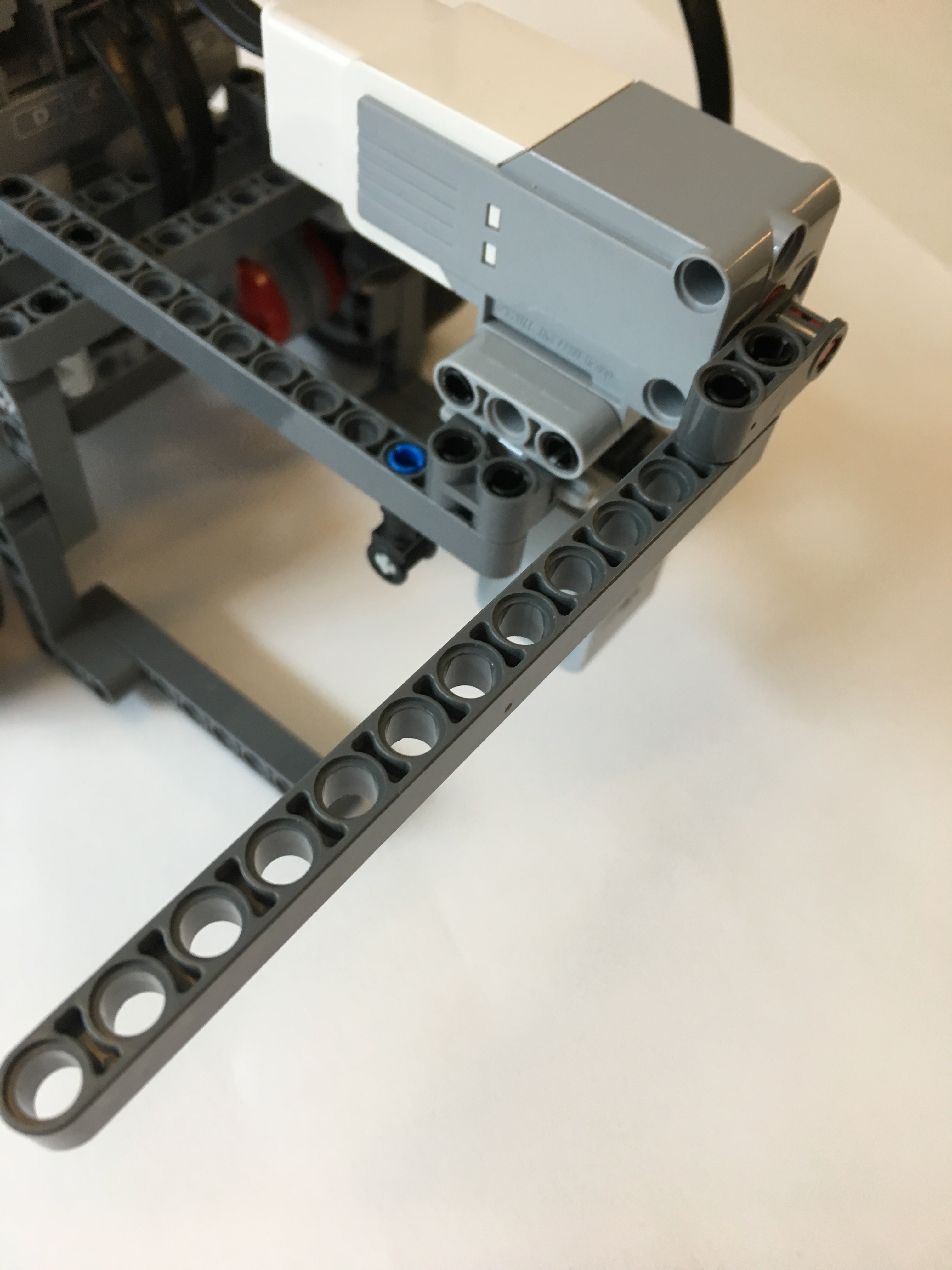
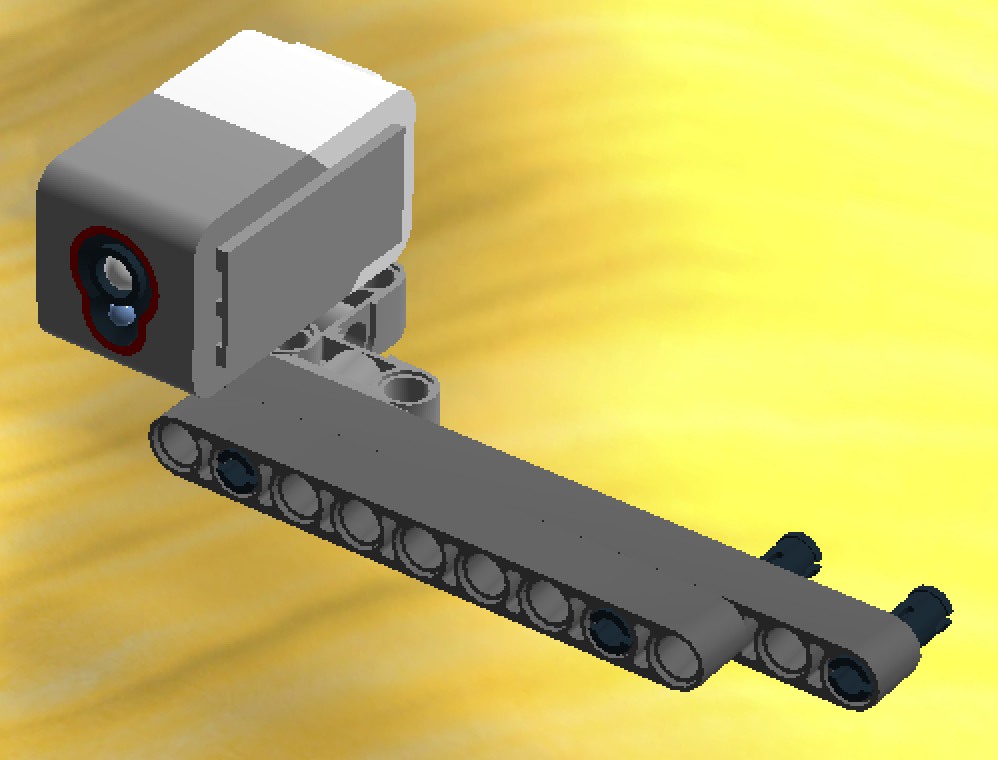
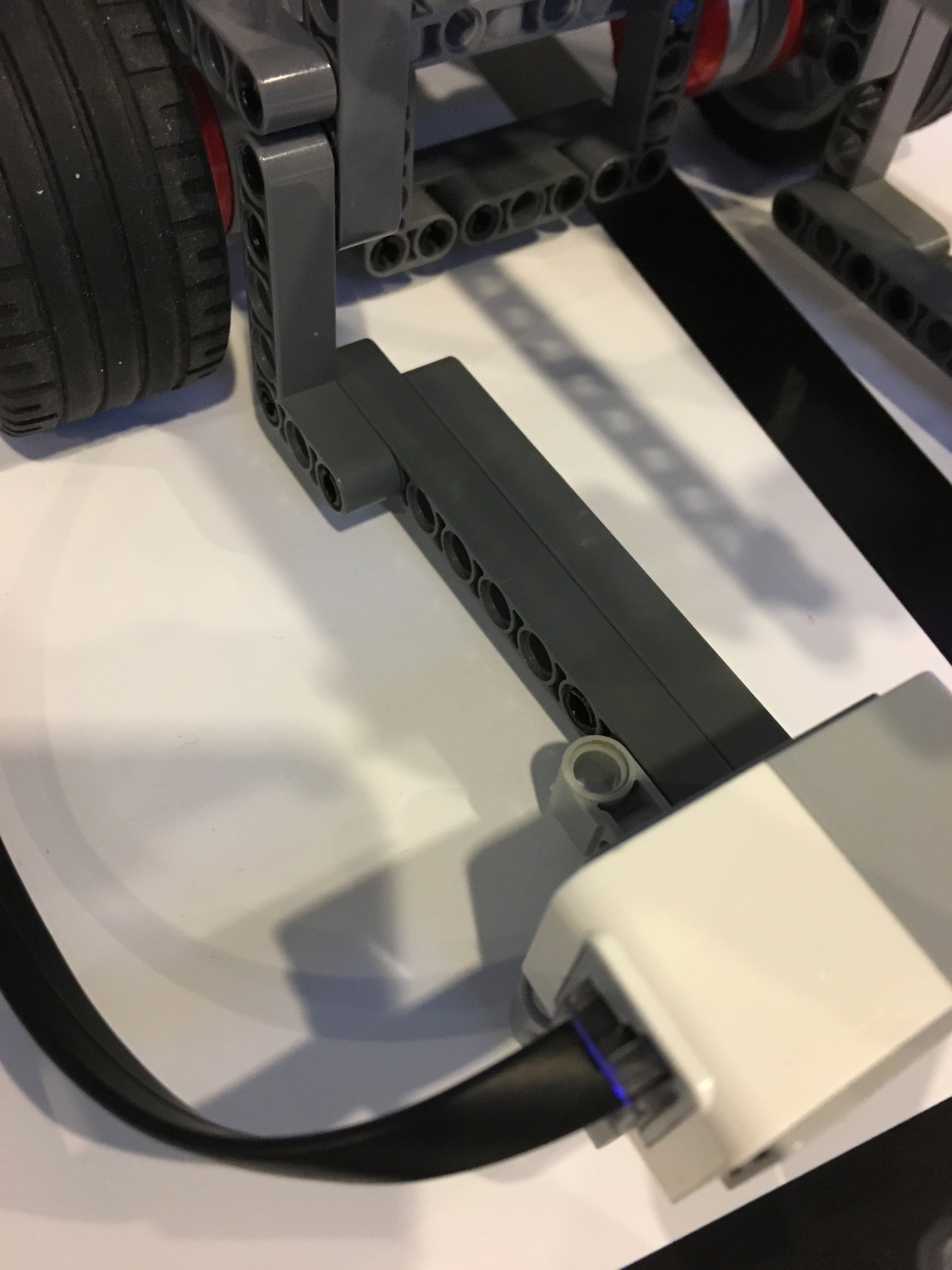
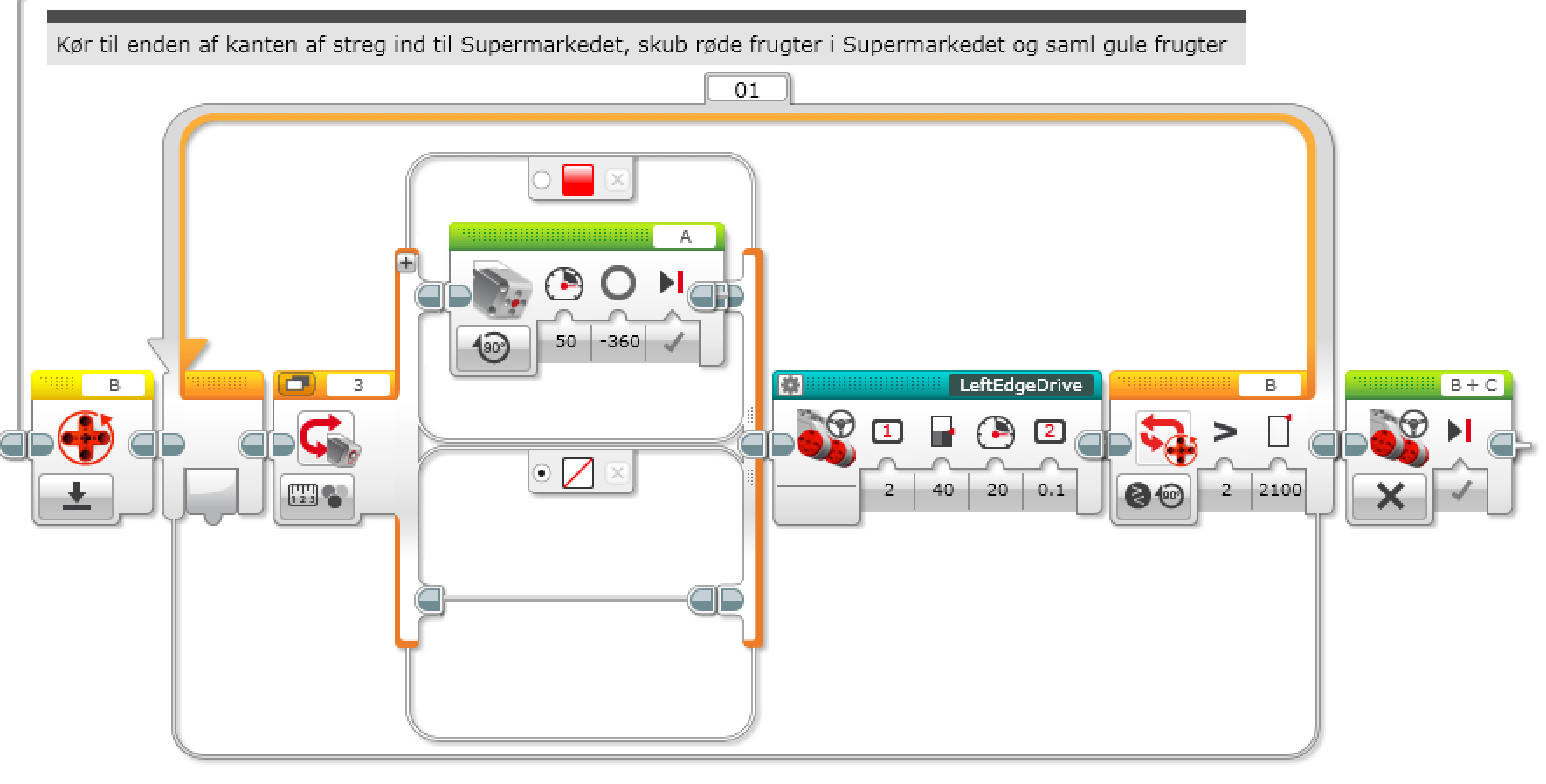
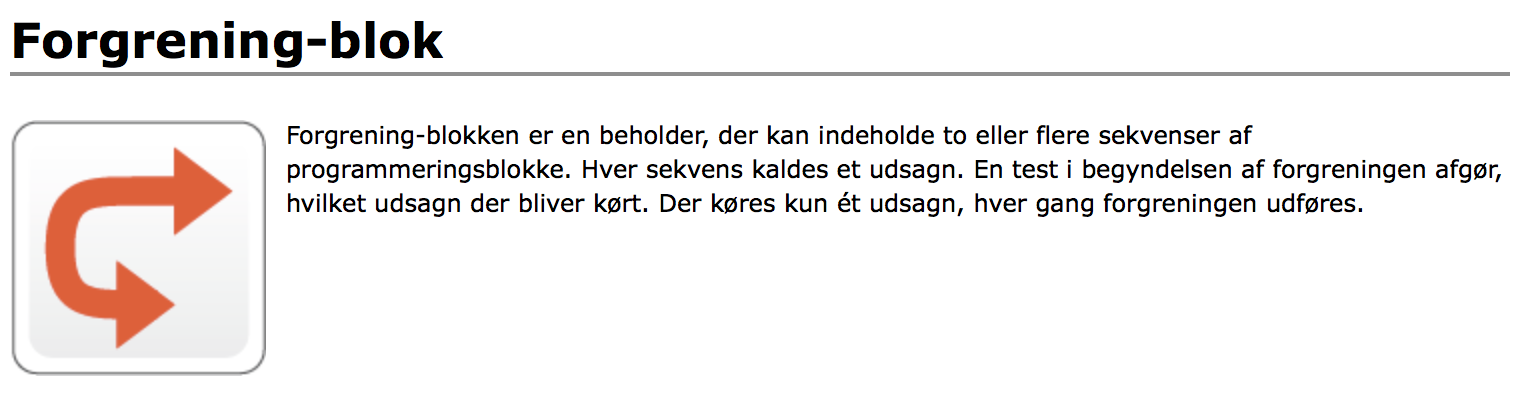
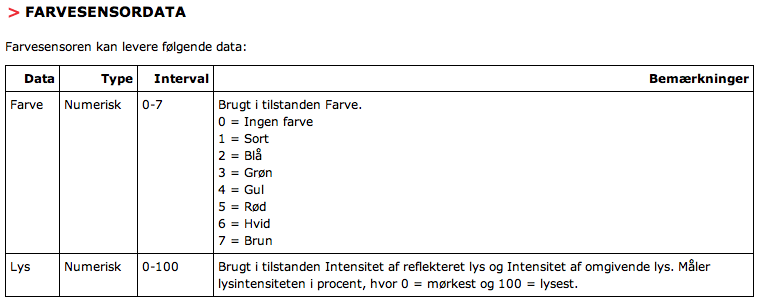
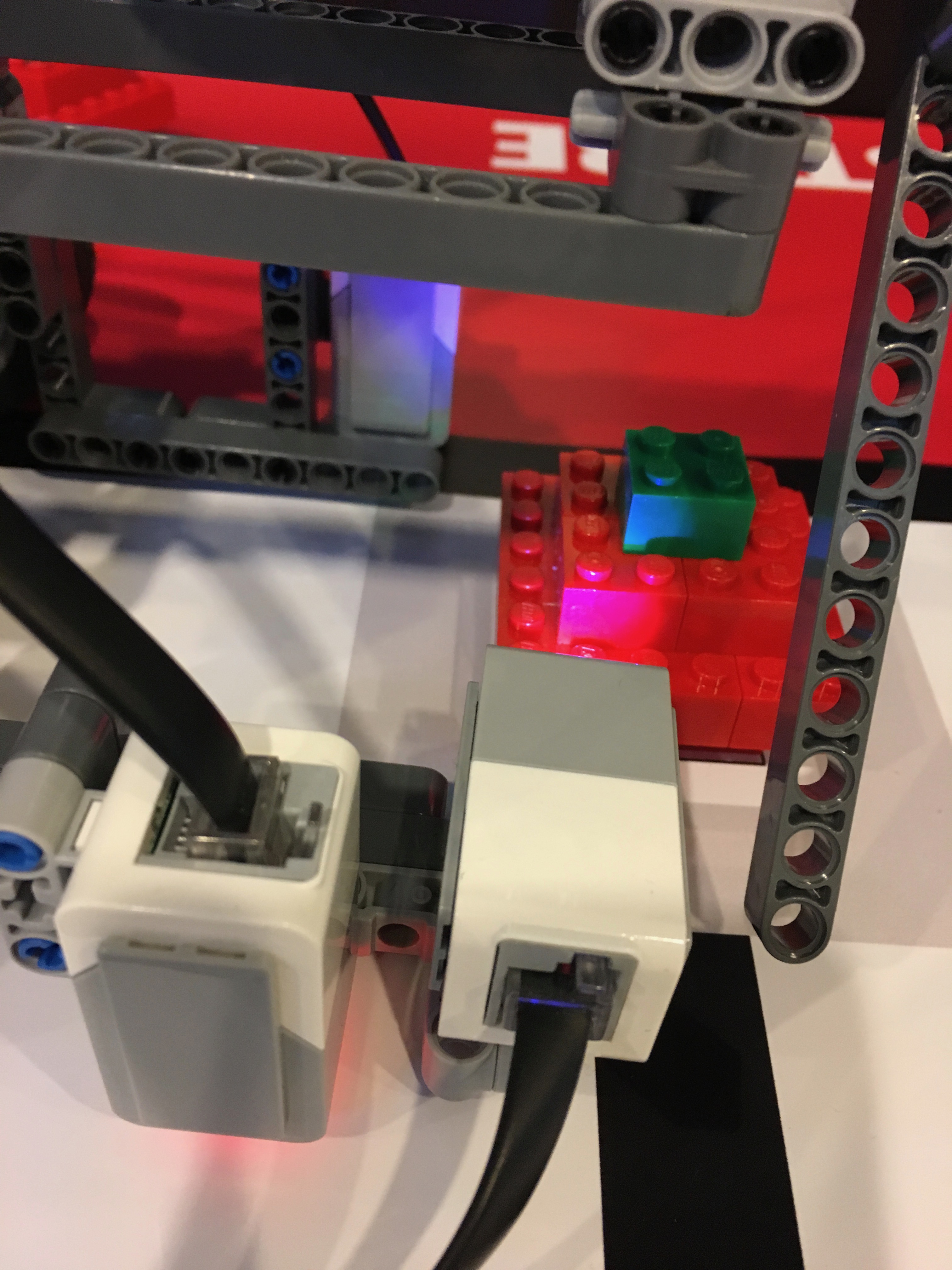
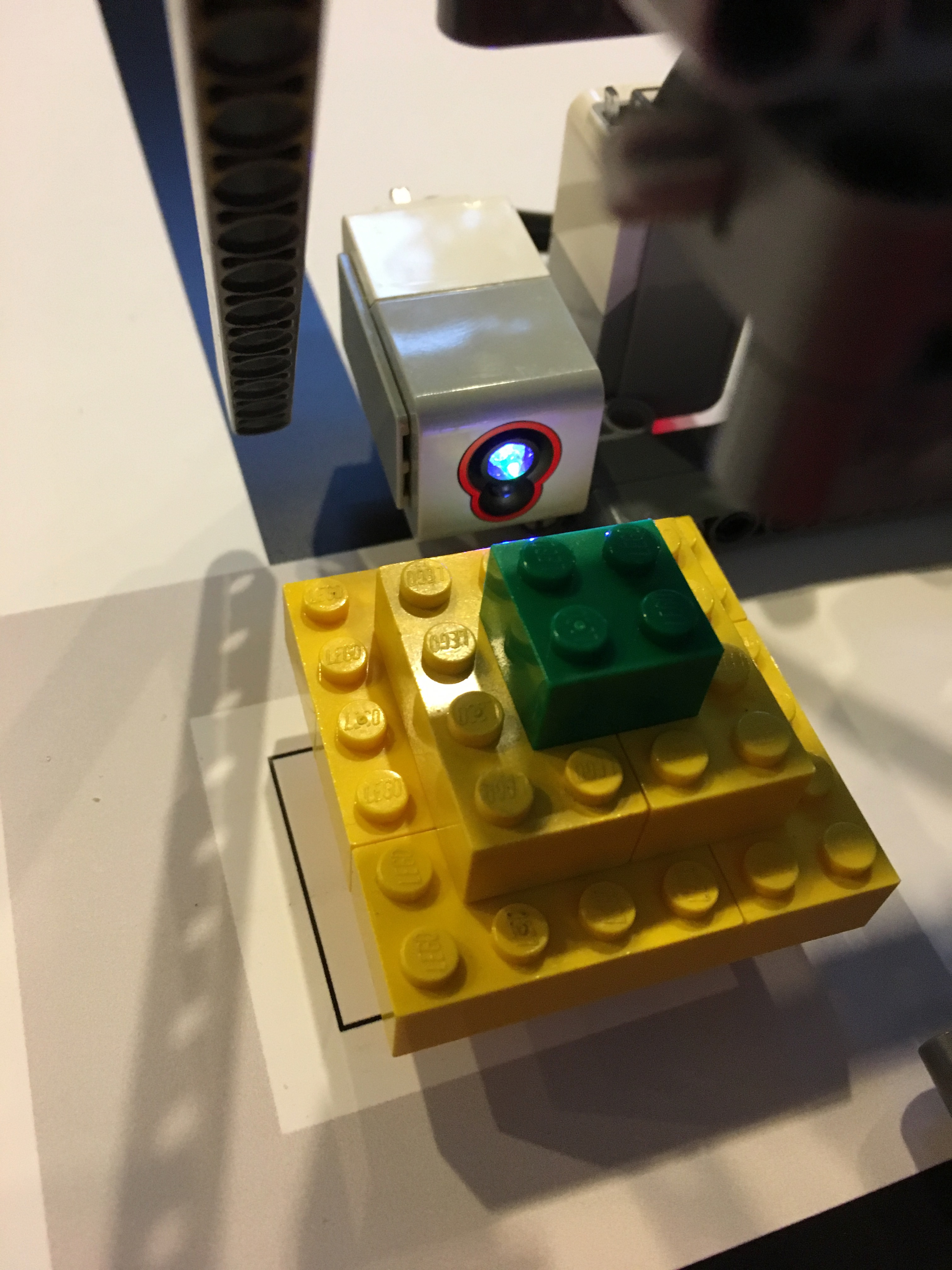
Robotudfordring trin 4I udfordringen er 3 styk frisk frugt og 2 styk grim frugt:tilfćldigt placeret i positionerne mćrket 6 til 10 pĺ banen, f.eks. som vist til hřjre: De friske frugter skal transporteres til et af de to Supermarkeder (et af de to rektangulćre rřde omrĺder mćrket GROCERY STORE). De gule frugter skal transporteres til Marmeladefabrikken (det rektangulćre gule omrĺde). Robotten skal starte i Start omrĺdet (det hvide omrĺde i nederste hřjre hjřrne med to grřnne linier som kant) og robotten skal slutte i Slut omrĺdet (det rřde omrĺde i řverste hřjre hjřrne mćrket FINISH). Udfordringen skal klares pĺ under 2 minuter. Pointgivning for de enkelte robotopgaver pĺ banen i udfordringen pĺ trin 4 er: Der kan altsĺ maksimalt opnĺs 80 point for udfordringen pĺ trin 4. De detaljerede regler kan ses her. Bygning og programmering af robot til trin 4 udfordringenPĺ videoen fra WRO 2018 Elementary - Surrogate Robotics ses, hvordan en svingarm skubber den rřde frugt ind i et Supermarked:Inspireret af ideen med en svingarm, kan robotten fra trin 3 udfordringen med en farvesensor monteret pĺ venstre side af skubbestativet: udbygges til trin 4 udfordringen ved at montere en svingarm sĺdan her: Samtidig er der monteret en farvesensor pĺ hřjre ben af skubbestativet, som peger ind mod de frugter robotten har foran skubbestativet, sĺ farven pĺ frugten kan registreres og kun de rřde frugter skubbes ind i Supermarkedet af svingarmen. Videoen viser, hvordan robotten til trin 4 udfordringen hĺndtere den rřde og gule frugt: Svingarmen er bygget sĺdan her (klik pĺ billedet for at se detaljer): Svingarmen kan bygges ved at fřlge en byggevejledning. Sidst i vejledningen ses en liste over de LEGO elementer svingarmen er bygget af. Byggevejledning for svingarmen er lavet ved hjćlp af vćrktřjet LEGO Digital Designer (LDD). Byggevejledningen findes i filen svingarm.lxf. Det kan vćre en fordel at bruge byggevejledning i filen til at bygge efter, da det giver mulighed for at dreje LEGO modellerne pĺ skćrmen under byggeprocessen. Inden filen kan bruges, skal LDD installeres pĺ maskinen. Nĺr en byggevejledning er ĺbnet i LDD fĺs de enkelte trin i byggeprocessen ved at klikke pĺ knappen "Building guide mode" řverst til hřjre. Svingarmen monteres pĺ robotten, som vist her (klik pĺ billederne for at se detaljer): Den mellemstore motor, som styrer svingarmen tilsluttes port A. Farvesensormonteringen pĺ hřjre ben af skubbestativet er bygget sĺdan her (klik pĺ billedet for at se detaljer): Farvesensorbenet kan bygges ved at fřlge en byggevejledning. Sidst i vejledningen ses en liste over de LEGO elementer farvesensorbenet er bygget af. Farvesensorenbenet monteres pĺ robotten ved at fjerne hřjre ben pĺ skubbestativet og erstatte benet med det lidt lćngere ben med farvesensoren (klik pĺ billedet for at se detaljer): Den ekstra 9'er teknikbjćlke pĺ indersiden er sat pĺ for at robotten skal kunne bakke med de to gule frugter uden at frugterne hćnger pĺ farvesensoren. Farvesensoren tilsluttes port 3. Med svingarm og farvesensor kan robotten sřrge for, at de tre rřde frugter skubbes ind i Supermarkedet og de to gule frugter samles ind og det sker uanset hvilke positioner de fem styk frugt stĺr pĺ: Den del af programmet, som styrer robotten pĺ videoen, sĺ robotten křrer langs kanten af den sorte streg ind til Supermartkedet, ser sĺdan her ud: Hele programmet, kaldet femFrugter, kan findes i EV3 projektet Trin4.ev3. Den del af programmet, som hedder Křr til enden af kanten af streg ind til Supermarkedet, skub rřde frugter ind i Supermarkedet og saml gule frugter, benytter den brugerdefinerede blok LeftEdgeDrive pĺ samme mĺde, som blokken blev brugt i programmet langsKant i trin 3 udfordringen til at fĺ robotten til at křre langs den venstre kant af den sorte streg ind til Supermarkedet. Undervejs langs kanten bruges en forgrening-blok til at afgřre om der er en rřd frugt ud for svingarmens arm. Hvis der er en rřd frugt, altsĺ hvis spřrgsmĺlet i forgreningssćtningen giver svaret rřd, udfřres řverste gren, som er en mellemstor motor-blok, der svinger armen en omgang, 360 grader, med hastigheden 50. Resultatet er, at rřde stykker frugt skubbes ind i Supermarkedet, mens de gule stykker ikke skubbes, da nederste gren i forgrening-blokken ingen blokke har, sĺ der sker intet ved gul og de gule frugter samles derfor imellem skubbestativets to ben. Se eventuelt i EV3 Hjćlp > Programmering > Flow-blokke> Forgrening: og i EV3 Hjćlp > Programmering > Handlingsblokke > Mellemstor motor: Farver og farvesensorTidligere har farvesensoren vćret brugt til at mĺle en lysprocent, f.eks. for at fřlge kanten af den sorte streg. Nu bruges farvesensoren til at registrere en farve. At farvesensoren kan bruges til begge slags mĺlinger kan ses her under EV3 hjćlp > Generelt > Farve > Brug af farvesensoren:Farvesensoren kan altsĺ bruges i en af tre tilstande (Det er kun de to fřrste tilstande, der er brug for, derfor er teksten for den sidste tilstand ikke vist). Betydningen af det tal farvesensoren registrerer afhćnger af tilstanden: Nĺr farvesensoren er ud for en rřd frugt: ser portview for de to farvesensorer pĺ port 2 og 3 sĺdan her ud: Tilstanden for farvesensorer i visningen ovenfor er for port 2 Intensitet af reflekteret lys og tallet 36 vises. Det passer med, at farvesensoren mĺler lysprocenten over kanten af den sorte streg ind til Supermarkedet. Tilstanden for farvesensorer for port 3 er Farve og tallet 5, som registreres af farvesensoren pĺ port 3, viser, at farvesensoren er ud for en rřd flade. Opgave 1: Prřv at undersřge om de farver en farvesensorer registrerer ud for de fire forskellige slags frugt passer med fortolkningen i tabellen. F.eks. hvad vises i denne situation:
Opgave 2: Nĺr robotten har samlet de gule frugter og har skubbet de rřde frugter ind i Supermarkedet, stĺr den i denne position:Robotten pĺ billedet har to farvesensorer monteret pĺ benene af skubbestativet lige som robotten i trin 3 udfordringen. Brug den sidste del af programmet orangeRute2 fra trin 3 udfordringen til at fĺ robotten til at gřre sĺdan her: |