Sidst opdateret 2.9.18.
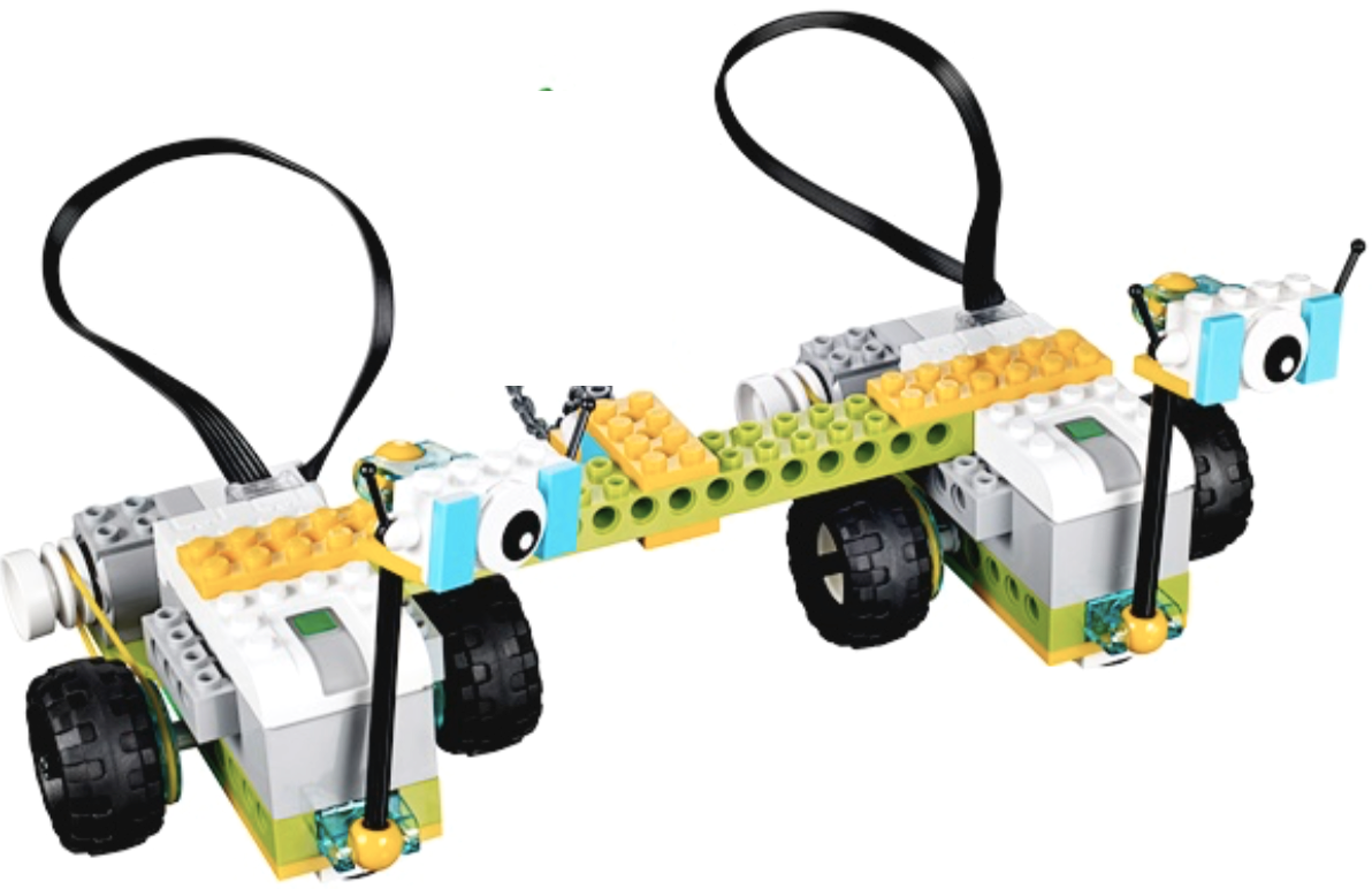
I WeDo 2.0-vejledningen er der et forslag til en samarbejdsøvelse. To Milo robotter foreslås sammenkoblet sådan her:
De to sammenkoblede robotter skal så styres f.eks. af to forskellige personer fra to forskellige enheder (PC/iPad/tablet). På den måde kan de sammenkoblede robotter bringes til at køre lige ud fremad, bakke eller dreje i buer til højre og venstre. På videoen ses hvordan de to sammenkoblede robotter kan bevæger sig, når de styres af én person fra to forskellige enheder (PC/iPad/tablet): Direkte kontrol af de sammenkoblede robotterHver af de to enheder programmeres med fire styringskommandoer:Hver af de to enheder kobles med hver sin robot. Nu kan de to robotter uafhængigt af hinanden bringes til at køre frem, bakke eller til at standse ved at bruge de tre første motor ikoner. Den sidste styrekommando bruges til at sætte hastigheden. På videoen ovenfor er hastigheden sat til 4. Prøv at eksperimentere med hvilke måder den sammenbkoblede robot kan køre på, f.eks. når de to robotter sættes til at køre hver sin vej. Prøv også med forskellig hastighed til de to motorer. |


