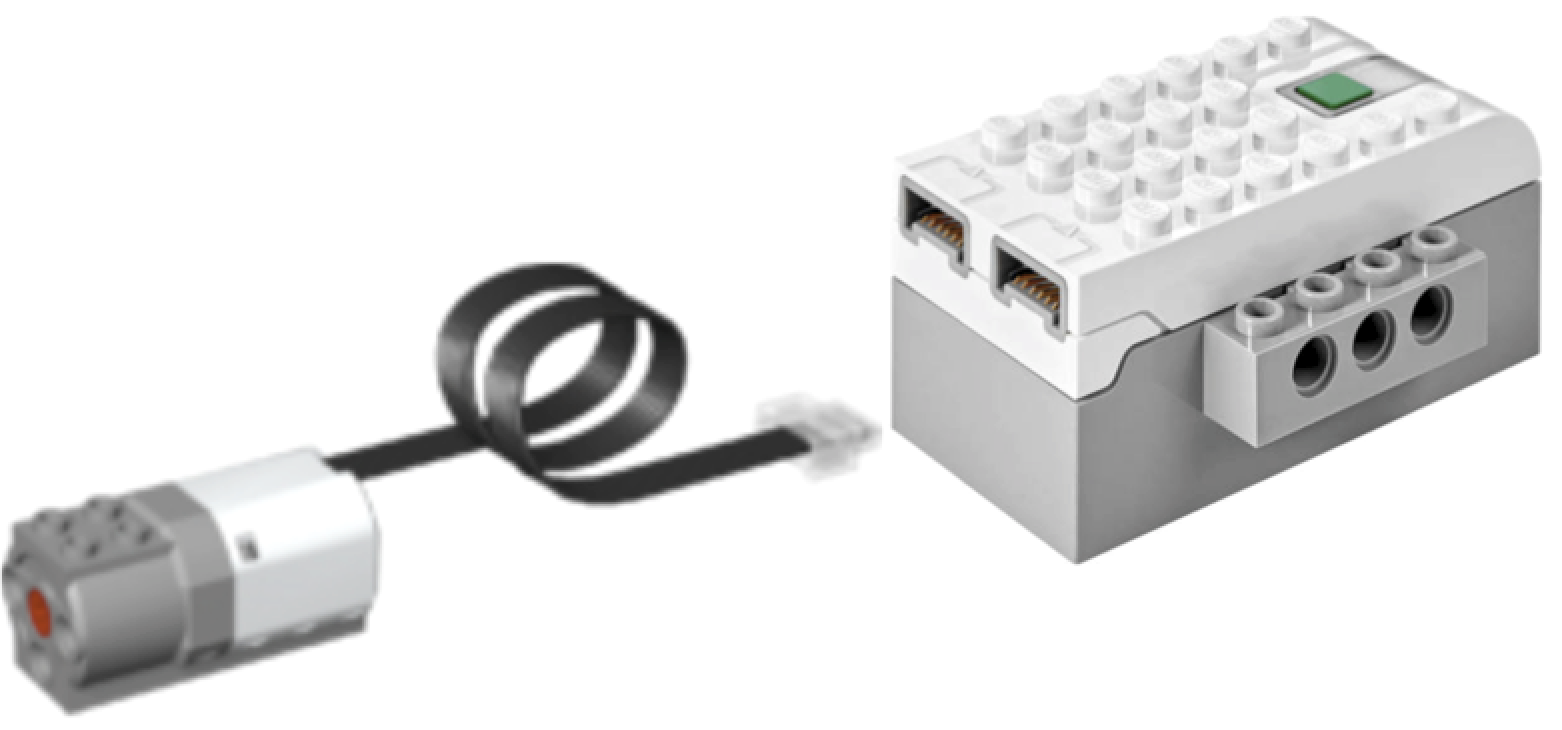
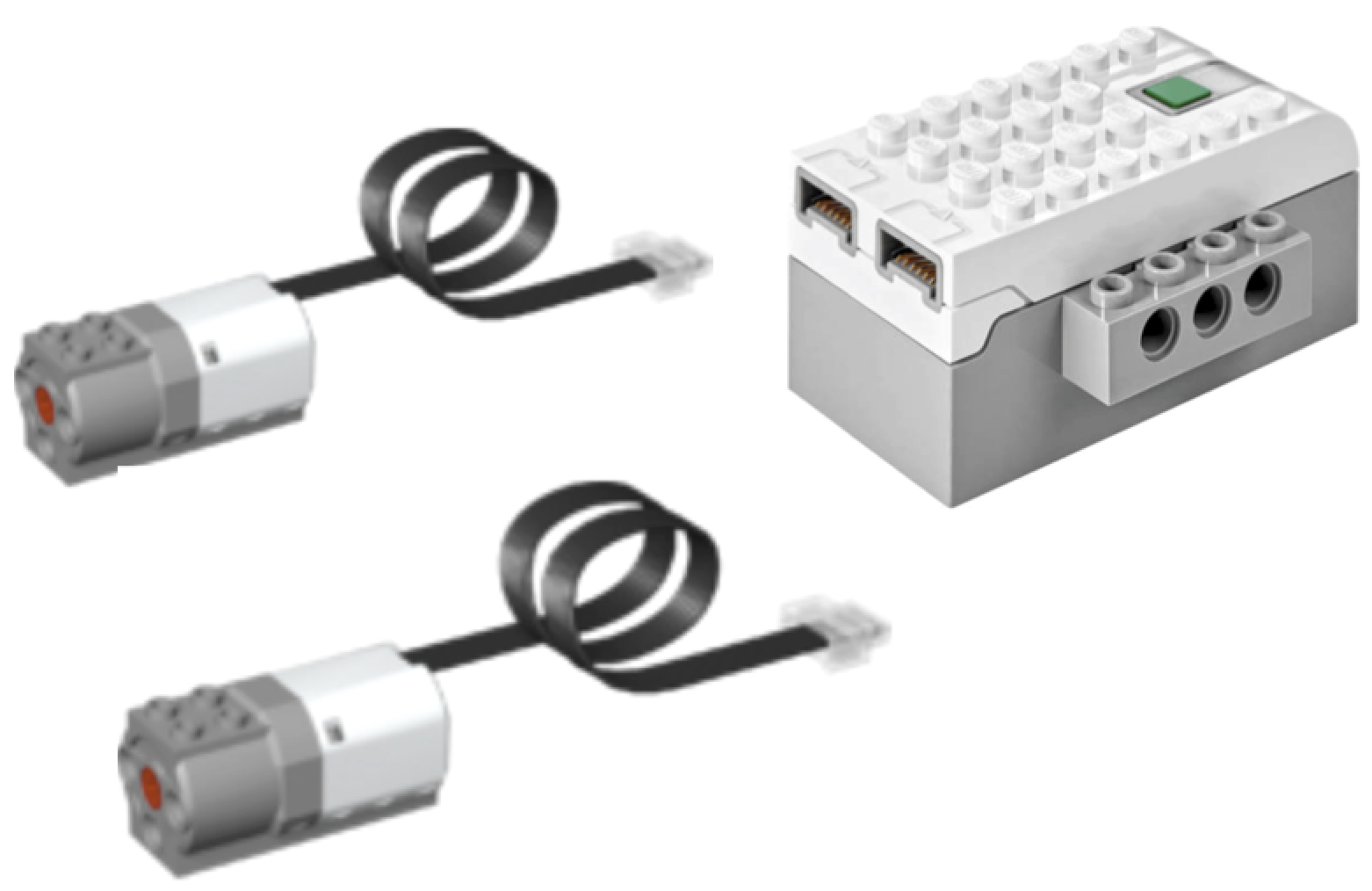
WeDo 2.0 er et byggesæt fra LEGO der udover
LEGO klodser indeholder to sensorer, en motor samt en kontrolenhed, som motor og sensorer kan tilsluttes.
Med sættet følger et programmeringsværktøj der gør det muligt
f.eks. fra en iPad at udføre et program, som trådløst kan aflæse sensorer og styrer motorer tilsluttet
kontrolenheden.
Her på siderne findes en række forslag til mobile robotter bygget og programmeret ved hjælp af LEGO WeDo 2.0 version 1.7.6.
Robotterne bruges bl.a. til at forklare hvilke former for kontrol
som kan programmeres i programmeringsværktøjet til WeDo. Programmeringen af alle robotterne
har det til fælles, at programmeringen af WeDo
2.0 robotterne starter med
direkte kontrol (fjenrstyring) inden
programmeret kontrol tages i brug.
Det har vist sig, at denne måde at introducere programmering på er umiddelbart tilgængelig for de fleste elever
i målgruppen for WeDo 2.0.
Aktiviteterne omkring forskellige mobile robotter er bl.a. tænkt som støtte til at bygge og programmere robotter
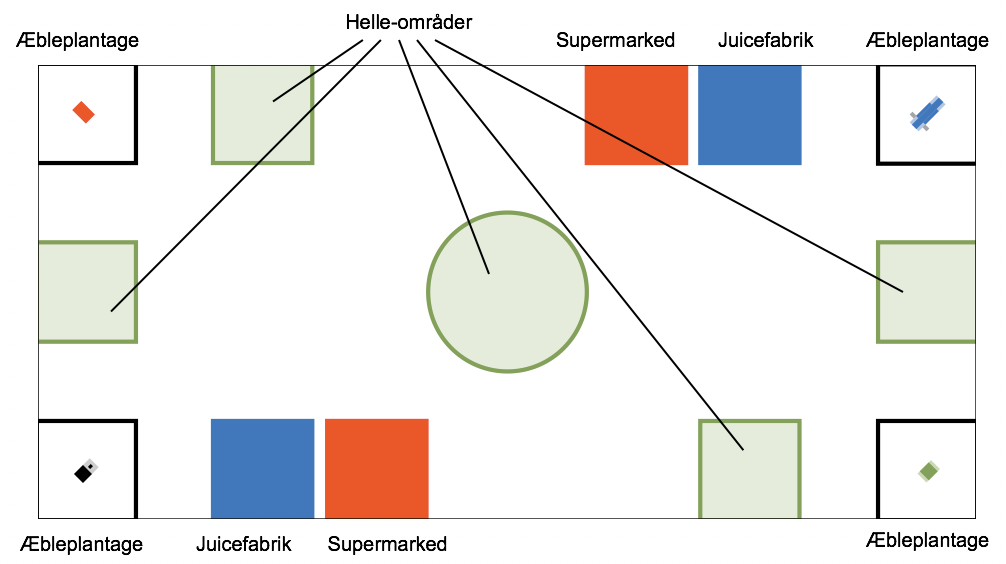
til at klare World Robot Olympiad konkurrencebaner som f.eks. banen
fra robotkonkurrencen WRO WeDo Regular 2018
for indskolingen.
På videoen til venstre ses en banekørsel på Sødalskolen, Aarhus, forår 2018. Et hold på tre deltagere klarer
WRO WeDo Regular 2018 banen, som er vist til højre. Holdet benytter
direkte kontrol
af en mobil WeDo 2.0 robot med blot én motor:
Der er fem programmerings ikoner som styrer motorerne forfundet til WeDo 2.0 kontrolenheder:
I Motor ikoner beskrives den præcise betydning af de fem ikoner
bl.a. hvordan retning og hastighed er bestemt, når en motor sættes igang. Hvordan motor ikonerne bruges til at
styre en mobil robot afhænger af antallet af motorer og antallet af kontrolenheder, som indgår i robotten.
I det følgende beskrives en række mobile WeDo 2.0 robotter inddelt efter hvor mange motorer og kontrolenheder, der indgår i robotten.
Beskrivelserne er forsøgt lavet, så de ikke behøver at blive læst i den rækkefølge de står.
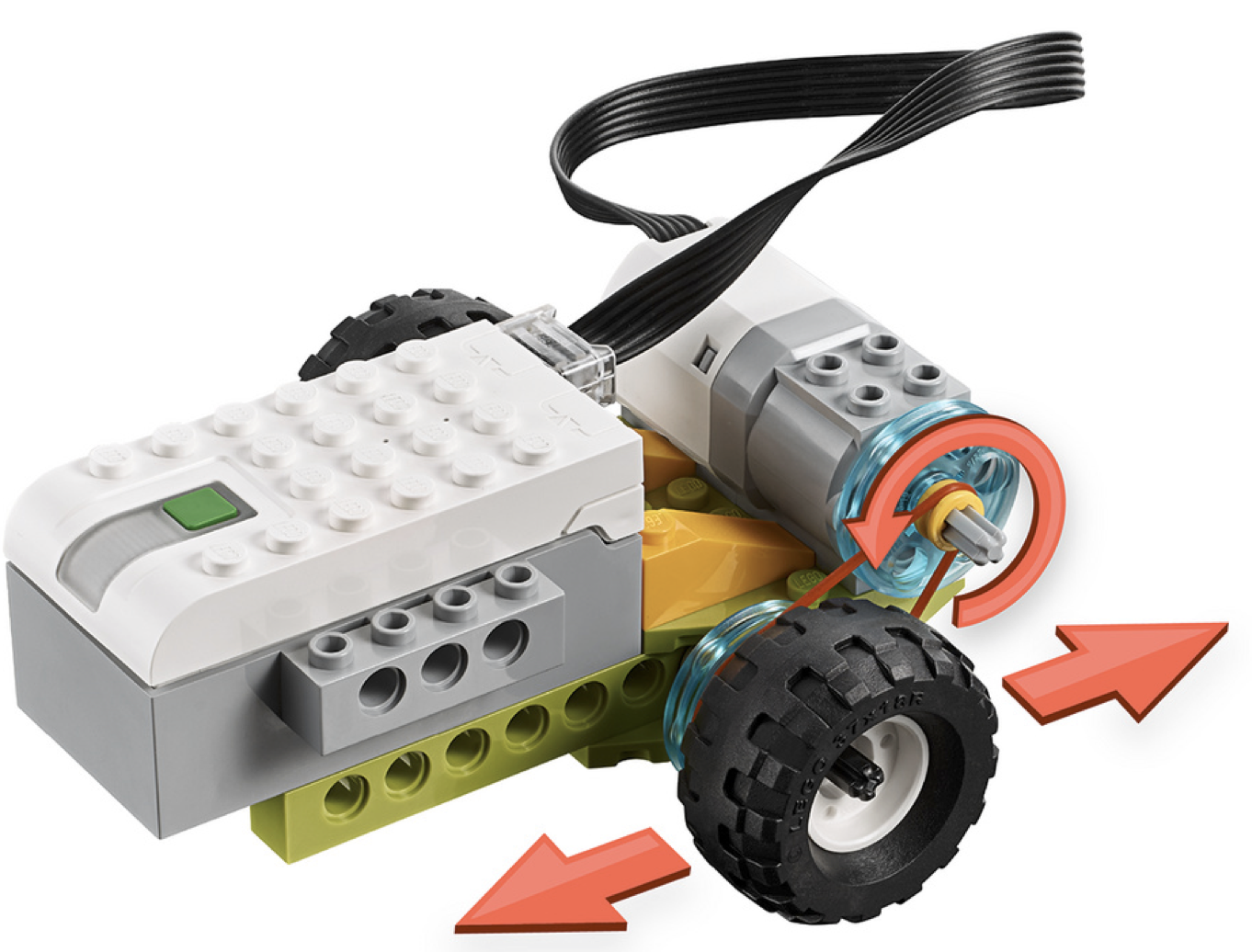
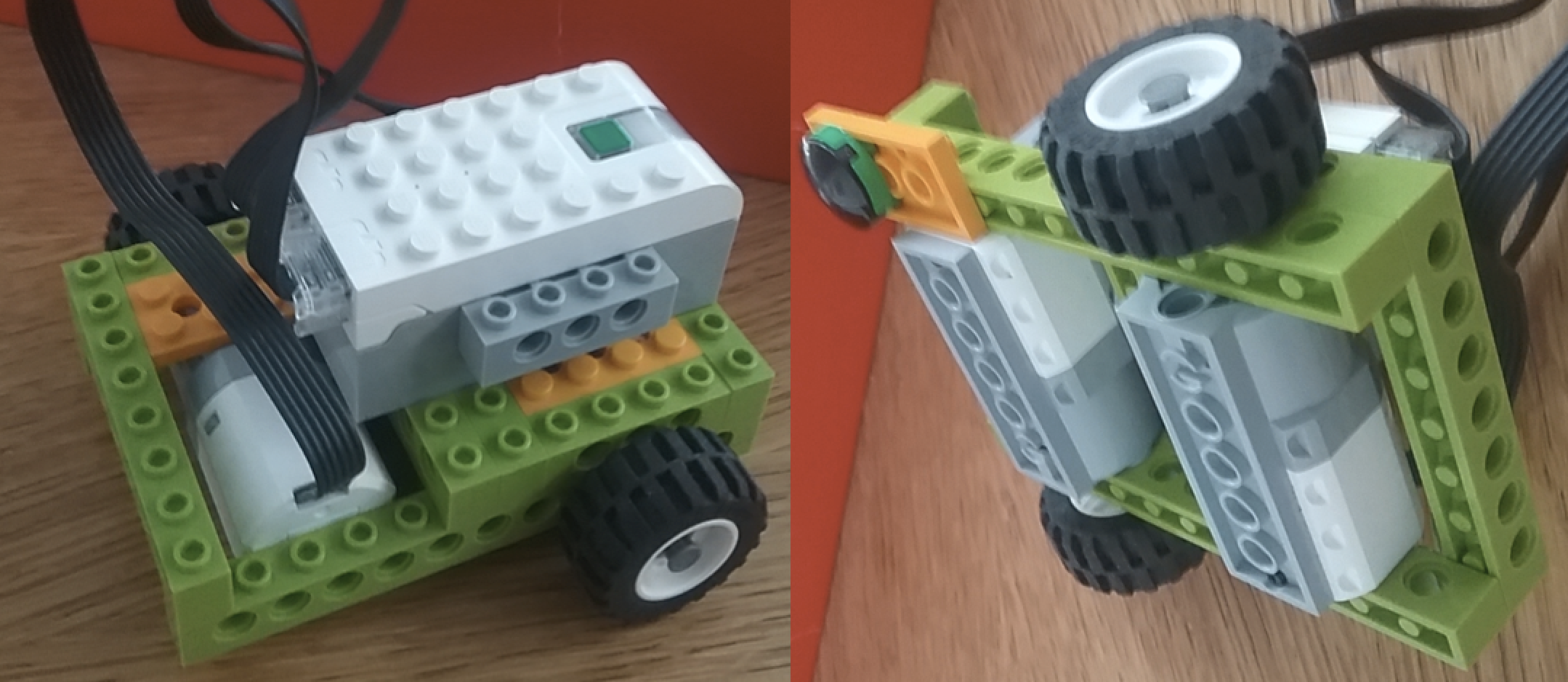
I modelbiblioteket i programmeringsværktøjet
findes en byggevejledning for en mobil robot
som med én motor kan køre lige ud frem og
lige ud tilbage. Det beskrives, hvordan direkte
og programmeret kontrol kan bruges til at styre
sådan en robot.
I modelbiblioteket i programmeringsværktøjet
findes en byggevejledning for en mobil robot
som med blot én motor både kan køre lige ud
og dreje på stedet. Det beskrives, hvordan direkte
og programmeret kontrol kan bruges til at styre
sådan en robot.
2. Robotter med én kontrolenhed og to motor
Advarsel:
Med to motorer tilsluttet én kontrolenhed drænes strømkilden
rimeligt hurtigt og kontrolenheden kan fejle tilfældigt,
når der næsten ikke er mere strøm til kontrolenheden.
Der kan tilsluttes to motorer til én kontrolenhed. Det betyder,
at det er muligt at bygge en mobil robot, som ikke alene kan køre
frem og bakke, men også dreje til begge sider. Det beskrives,
hvordan direkte og programmeret kontrol kan bruges til at styre
sådan en robot.
Når to motorer bruges uafhængigt af hinanden til
at styre en robot kaldes det
Differential wheeled robot.
Med to motorer på én kontrolenhed kan der bygges
en mobil robot, der kan styres efter samme princip
som en bil: baghjulene trækkes af én motor, forhjulene
kan drejes på stedet af en anden motor.
På denne måde kan der opnås en mobil robot
som kører meget præcist ligeud, men som er lidt
besværlig at manøvrere.
3. Robotter med to kontrolenheder og to motor
En mobil robot med to uafhængigt styrede motorer er let at manøvrere.
Sættes de to motorer på to forskellige kontrolenheder har de to motorer
hver sin strømkilden og så undgås problemet med hurtig dræn af strøm som jo
skete med to motorer tilsluttet én kontrolenhed.
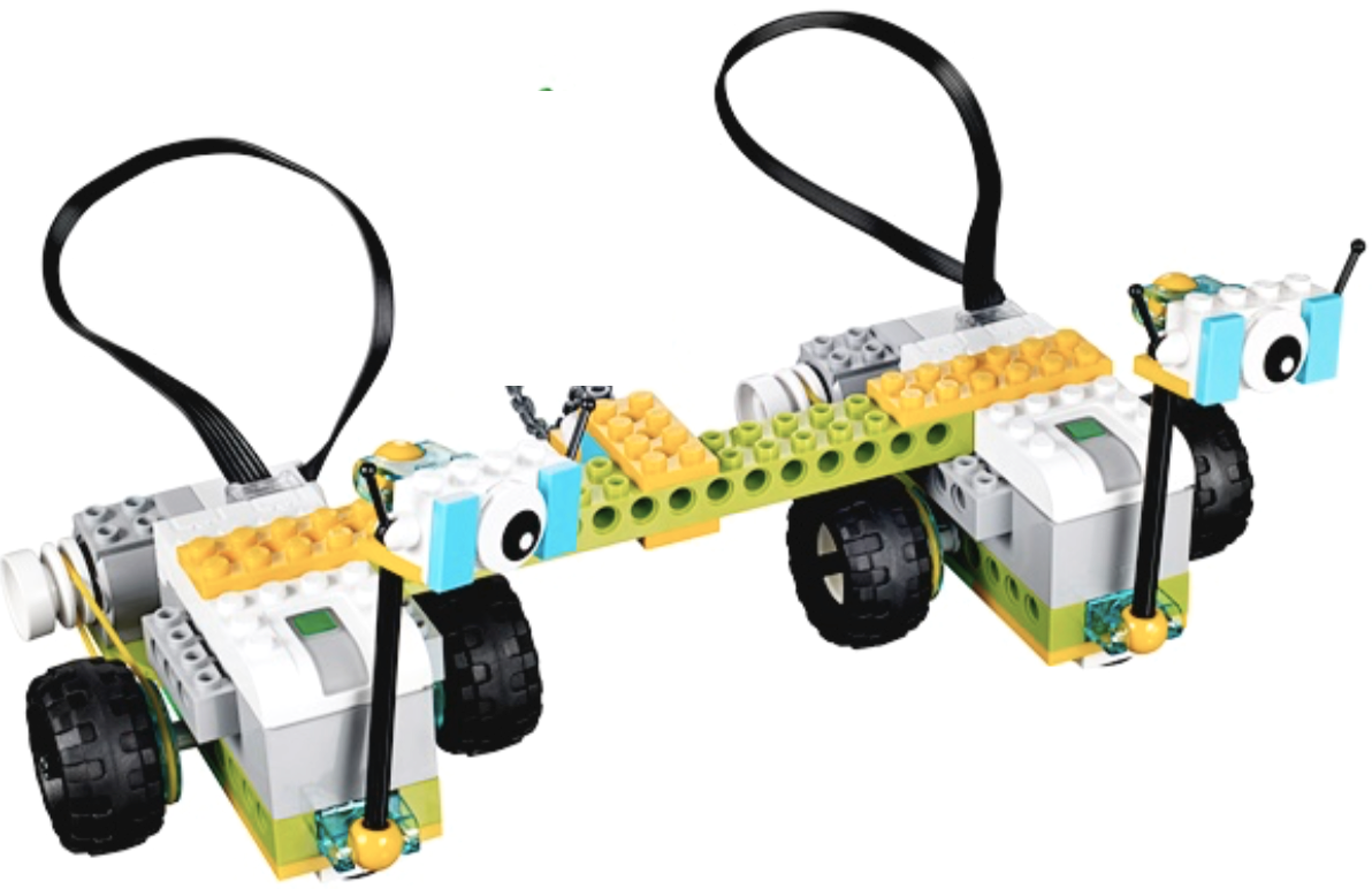
Robotten Milo fra WeDo 2.0-vejledningen, som har
én kontrolenhed og én motor, kan køre frem og tilbage.
Samkobles to Milo robotter som beskrevet i vejledningen,
så de to robotter følges tæt ad, kan de ikke alene kører
frem og tilbage, de kan også dreje til begge sider
afhængig af hvordan de to robotter styres.
Styres de to robotter fra hver sin enhed, f.eks. to iPad,
kan de sammenkoblede robotter styres med direkte kontrol.
På den måde kan to personer samarbejde om at køre en rute
fra et sted til et andet udenom opstillede forhindringer
(f.eks. i en labyrint). Aktiviteten introducere meget konkret,
hvordan to motorer kan bruges uafhængigt af hinanden til
at styre en robot.
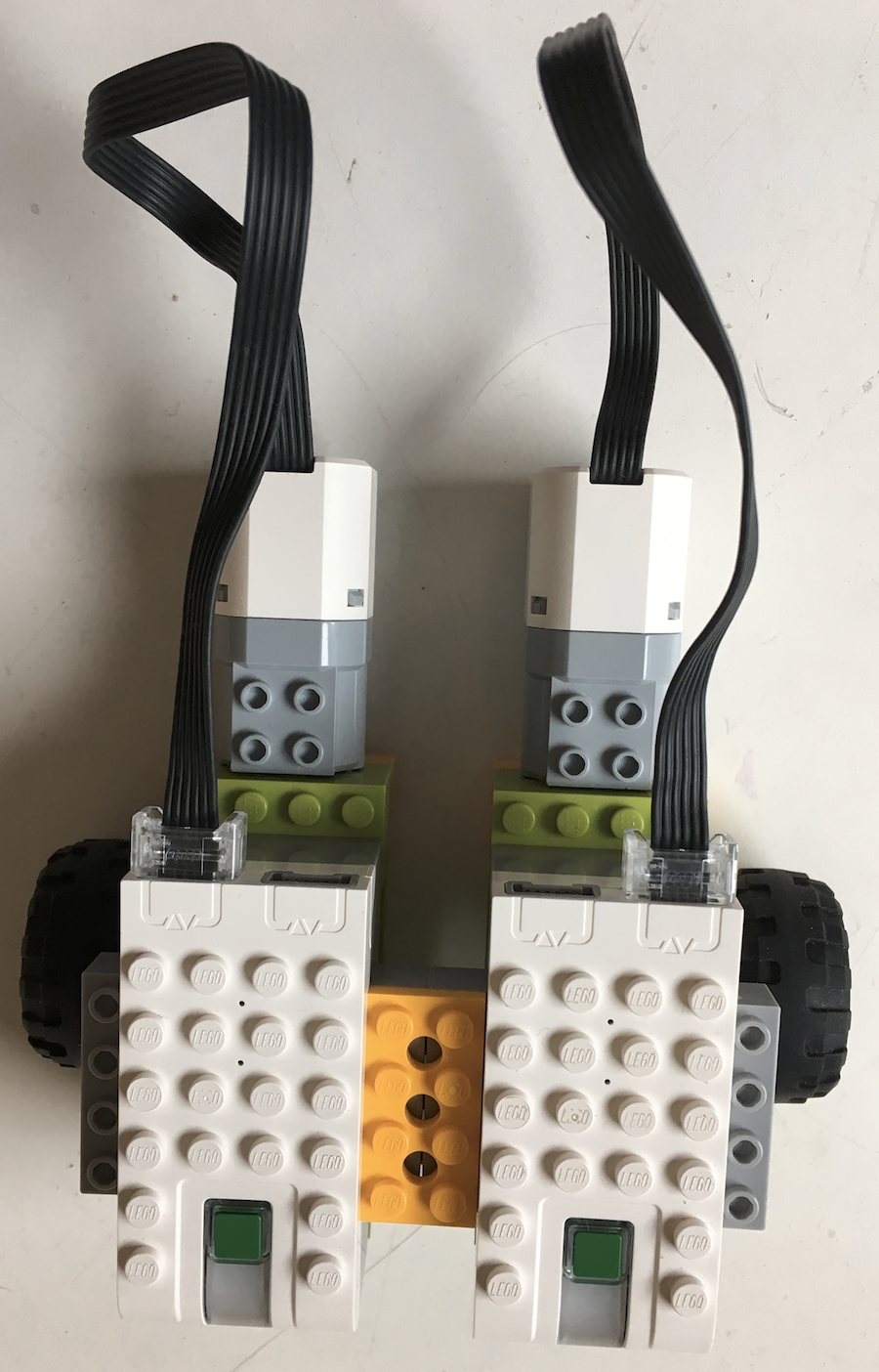
En robot kan bygges med to motorer tilsluttet to forskellige
kontrolenheder. Motorerne styrer hver sit hjul på hver sin
side af robotten. Det betyder, at det er muligt at bygge en
mobil robot, som ikke alene kan køre frem og bakke, men
også dreje til begge sider. Det beskrives, hvordan direkte
og programmeret kontrol kan bruges til at styre sådan en
robot.
Når to motorer bruges uafhængigt af hinanden til
at styre en robot kaldes det
Differential wheeled robot.