![]()
Sidst opdateret 23.8.14.
Flere af robotterne på YouTube benytter kanterne af banen til at navigere,
enten ved at bakke ind i kanten, så robotten retter op, eller ved at køre langs kanten.
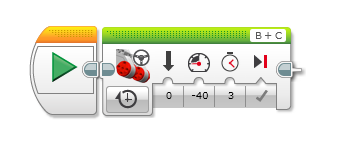
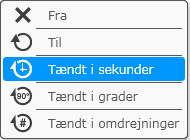
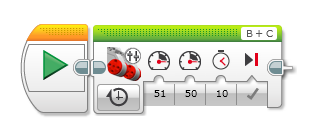
Ind i kantenPå dette klip fra FLL 2013 JenaXL, bakker robotten ind i kanten af banen, så den peger vinkelret ud fra kanten inden robotten kører videre:På videoen ses, at hjulene spinder et lille øjeblik ved robottens møde med kanten. Denne kørsel opnås ved at bruge en udgave af bevægelsesstyring-blokken, hvor styringstilstand vælges til "Tændt i sekunder": Derved opnås, at motorerne drejer videre, selvom robotten er stødt ind i kanten. På de to videoer benyttes denne udgave af bevægelstyrings-blokken til at bakke ind mod kanten og det ses tydeligt, hvordan robotten med en kofanger bag på retter op ved mødet med kanten: I FLL2017 missionen Filter benyttes denne metode med en kofanger bag på robotten til at rette op under robottens kørsel. Langs kantenMonteres to hjul på siden af robotten, som vist på videoen, kan robotten bringes til at køre langs kanten af banen:Det sker ved at lade robotten holde en smule til højre under kørslen, f.eks. ved at bruge tankstyring-blokken med en lille forskel imellem Strøm til venstre og højre motor, her 51 til venstre motor og 50 til højre: |